Inhaltsverzeichnis
QuattroKopter

|
Preis ohne Akku (~8€) und Teile für den Rahmen (~10€) circa 100€ |
Flugerfahrung
16.05.09 Wahnsinn, nach einigen kleineren Problemen fliegt das UFO jetzt echt gut! Nachdem ich gestern nach den ersten Startversuchen nochmal alle 4 Props und Regler umdrehen musste, da der Kreisel anstatt die Eigendrehung auszugleichen diese noch verstärkte, ging es heute schon richtig gut. Leider hab ich das UFO beim 2. Akku auf den einzigen Streifen Teer weit und breit gesetzt. Der Wind war wohl doch etwas zu stark und böig. Schaden: 1 Motorwelle (schon ersetzt) und 3 Props. Jetzt muss ich erstmal auf die GWS 3-Blatt ausweichen und auf neue 2-Blatt warten.
21.05.09 So, heute hab ich insgesammt 3 Akkus mit den 3-Blatt verflogen, geht wirklich prima mit ein wenig Gewöhnung, sogar Papa hat Spass an dem Ding gefunden und wollte es nicht mehr hergeben.
09.02.10 Also ich habe meinen Quattro nach längerer Pause letzte Woche mal wieder in der Halle geflogen und war überrascht wie gut und stabil das Ding jetzt fliegt. Nachdem ich mit den 1045er Props arge Probleme mit Übersteuern hatte sind jetzt wieder die GWS8040x3 (UH) drauf. Dann noch etwas am Poti auf der Platine gedreht und schwups steht das Ding sauber in der Luft und reagiert prima auf Steuerbefehle. Das Problem bei der Platine ist das man an der Regelung nicht viel drehen kann, man ist also auf eine passende Kombi von Achsabstand, Gewicht, Motoren und Props angewiesen damit er schön fliegt, dann noch etwas Finetuning am Platinenpoti und er fliegt!









Elektronik
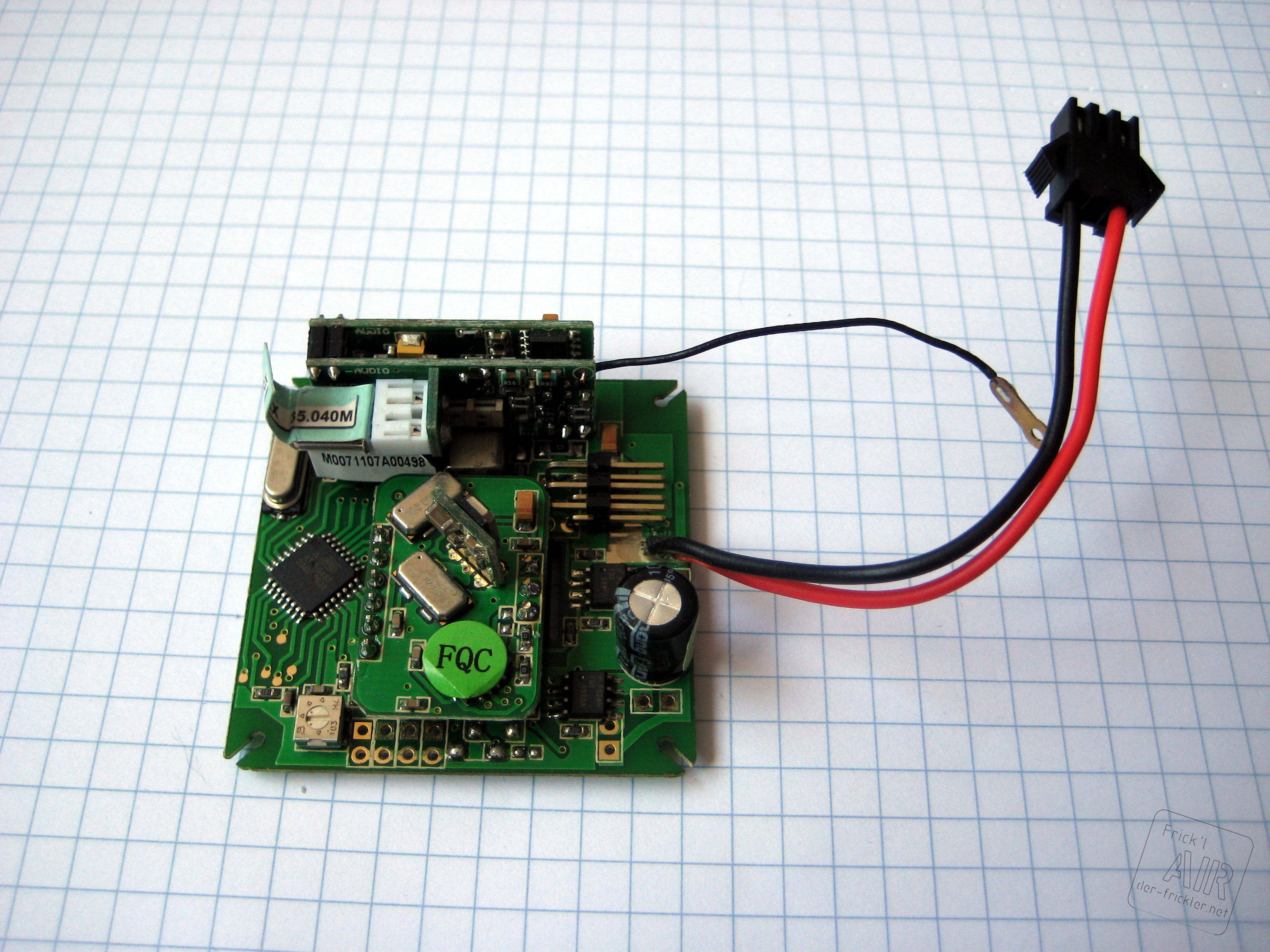
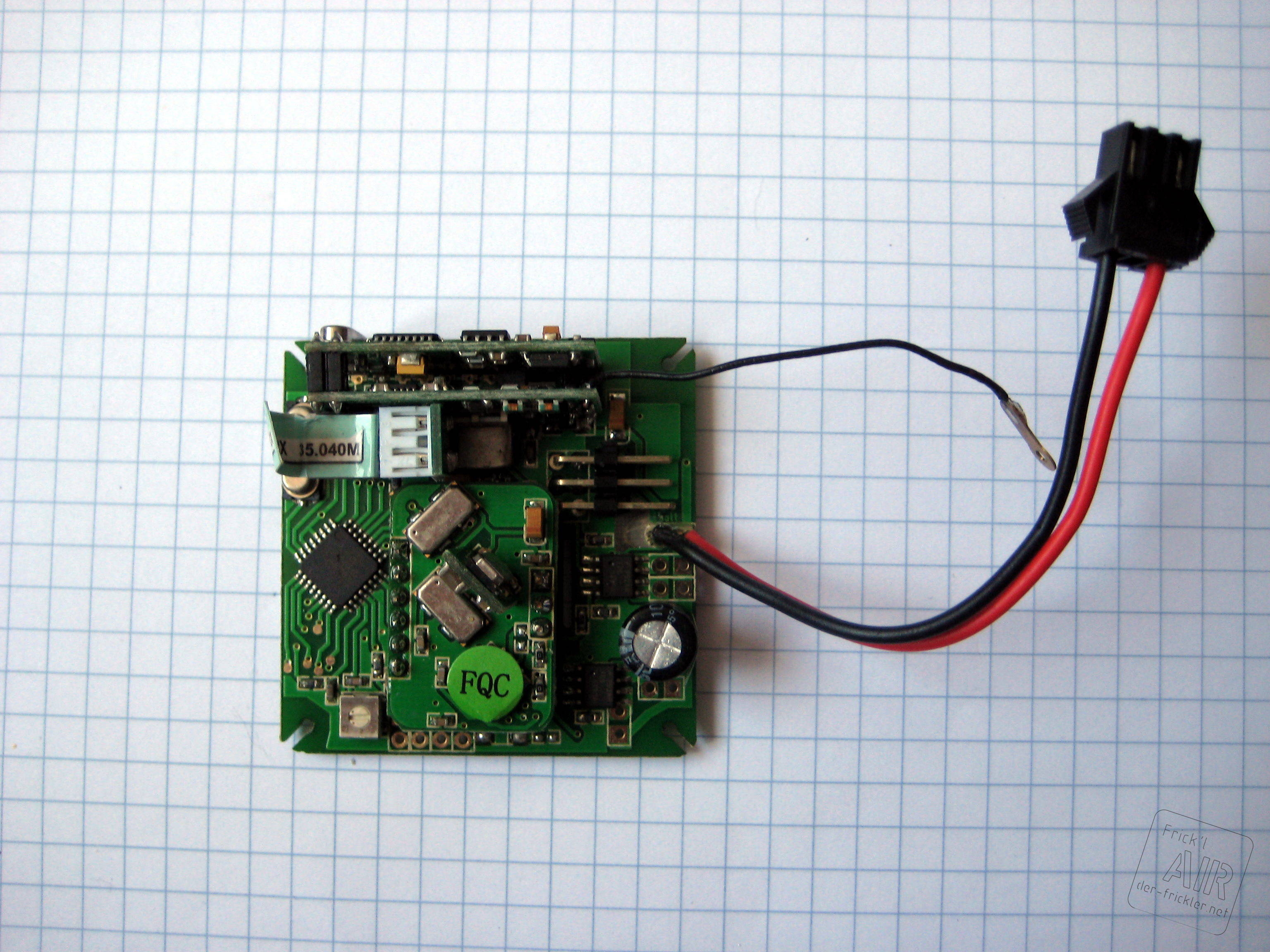
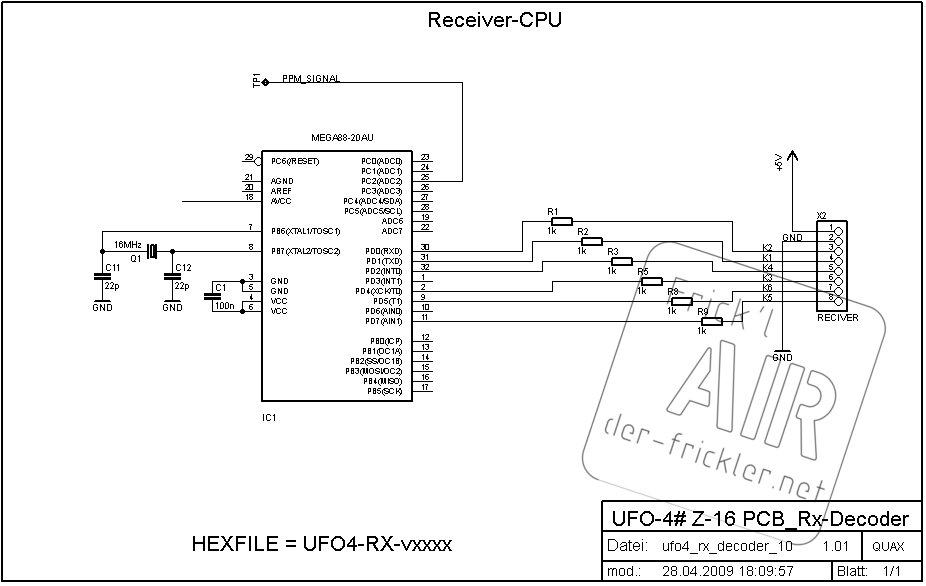
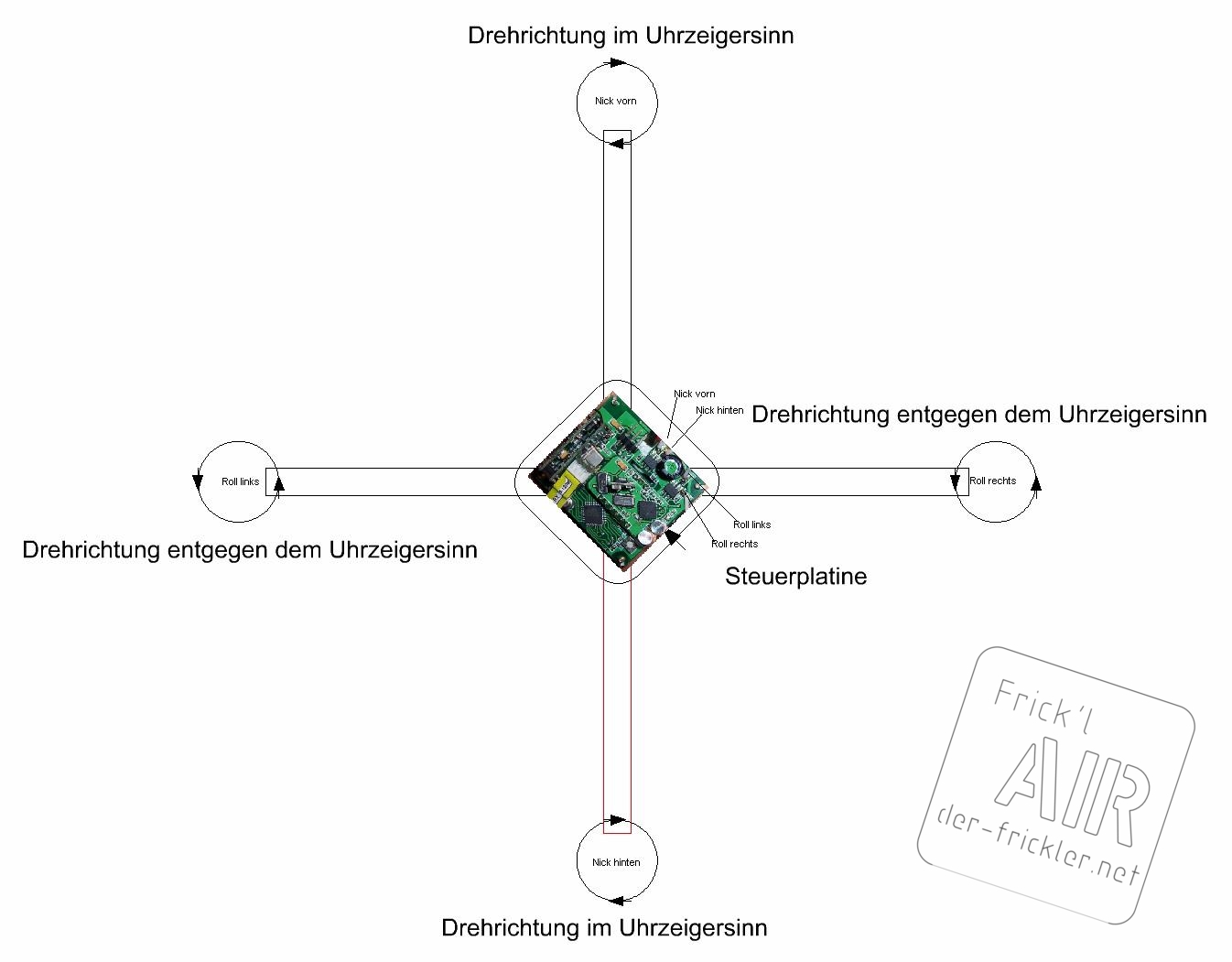
Die Platine verwendet einen Microprozessor sowie 3 Kreiseln und einen Beschleunigungssensor zur Flugstabilisierung. Sie ist als Ersatzteil für das Walkera UFO erhältlich. Der aufgelötete Empfänger funktioniert nur mit Walkera PCM Sendern und dem beiliegenden Quarz. Der vorhandene Empfänger kann aber mit etwas löten gegen einen Eigenen getauscht werden oder mittels einlötens und flashens einer neuen Firmware eines neuen MEGA8 auf normales PCM umgebaut werden.
Eine Beschreibung der UFO-Platine gibts auch hier


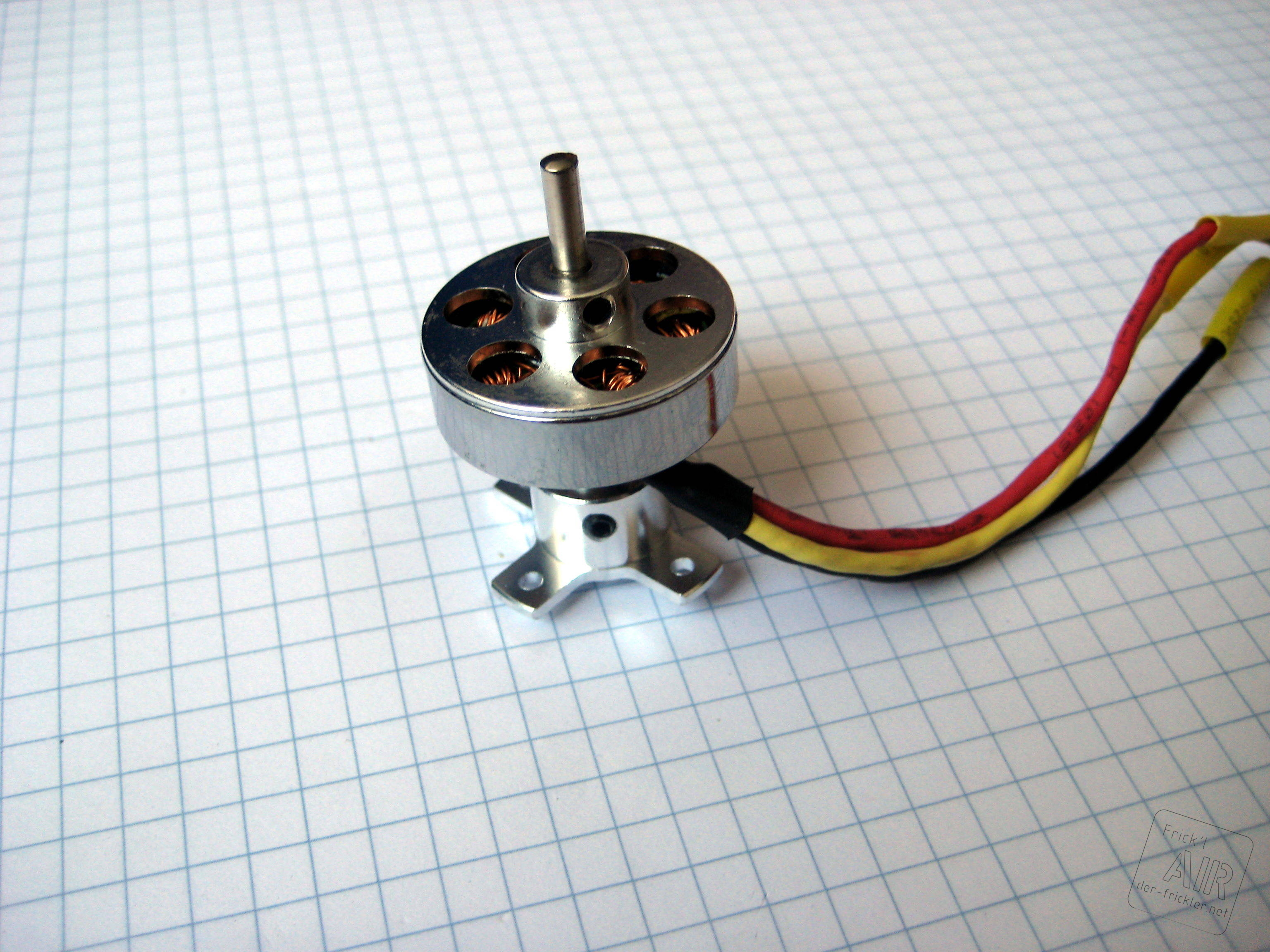
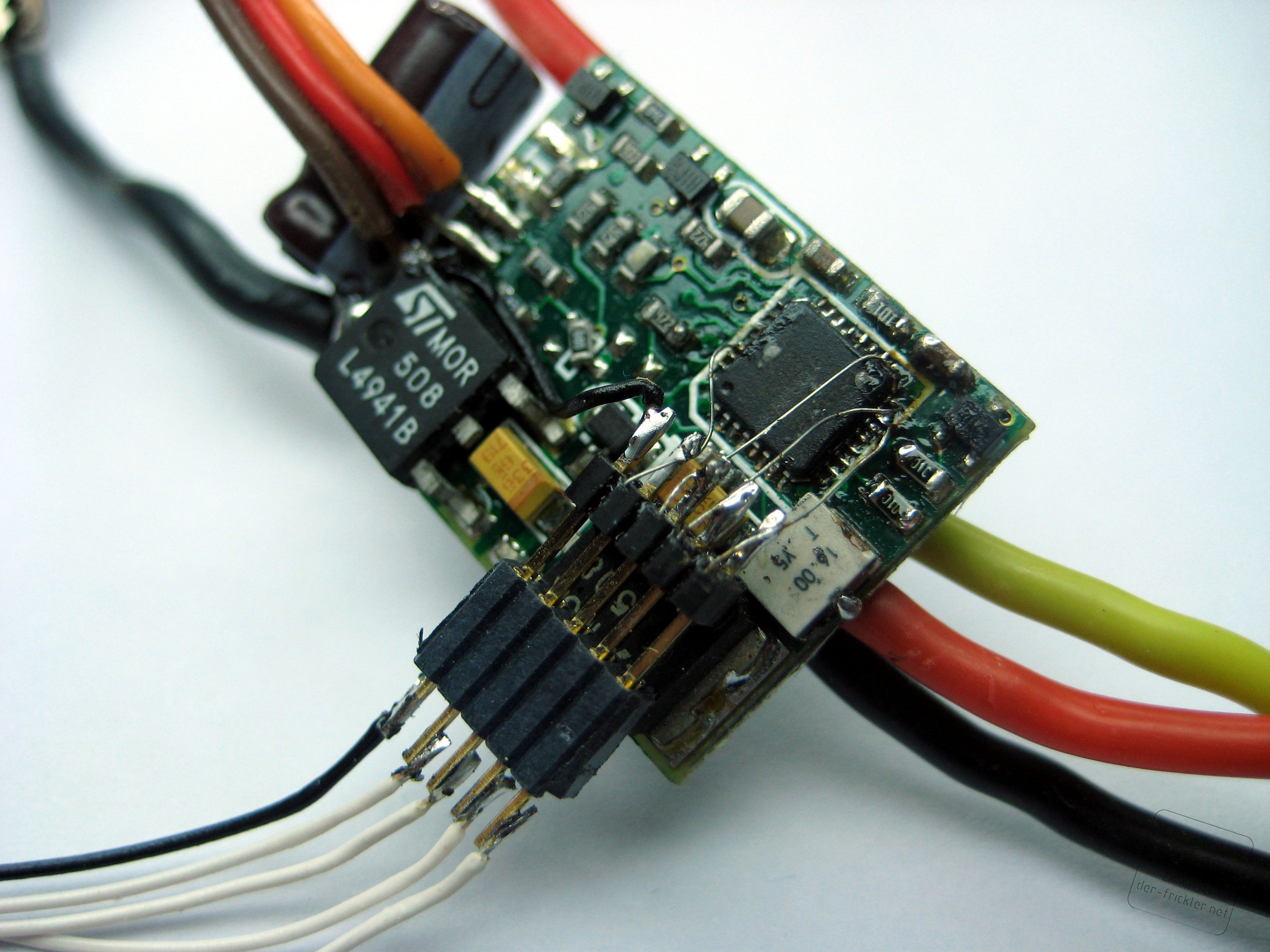
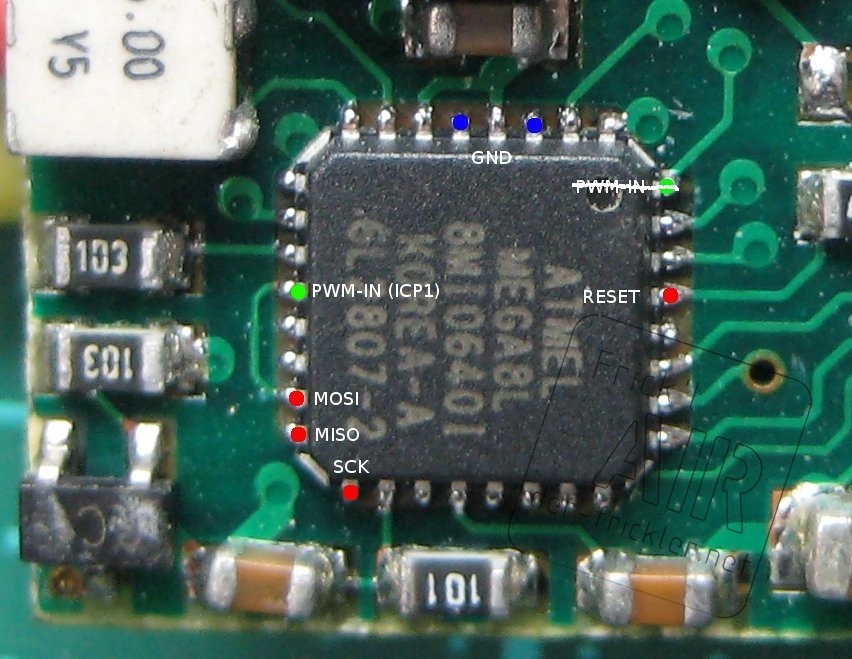
Antrieb
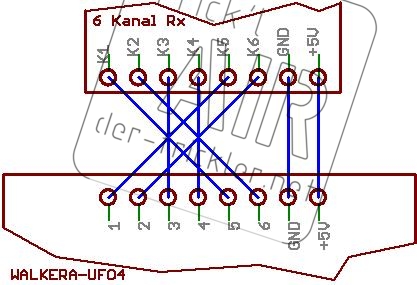
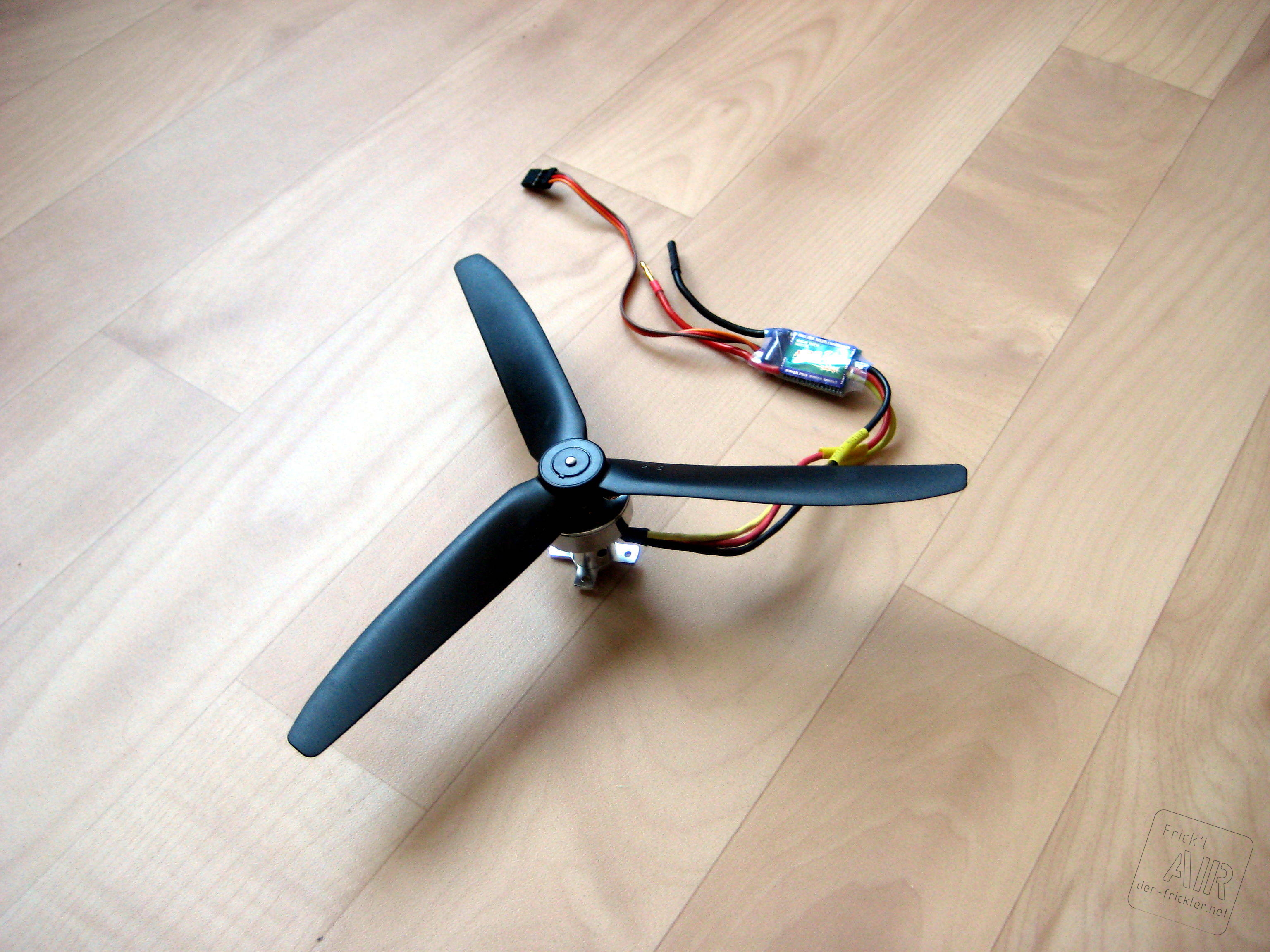
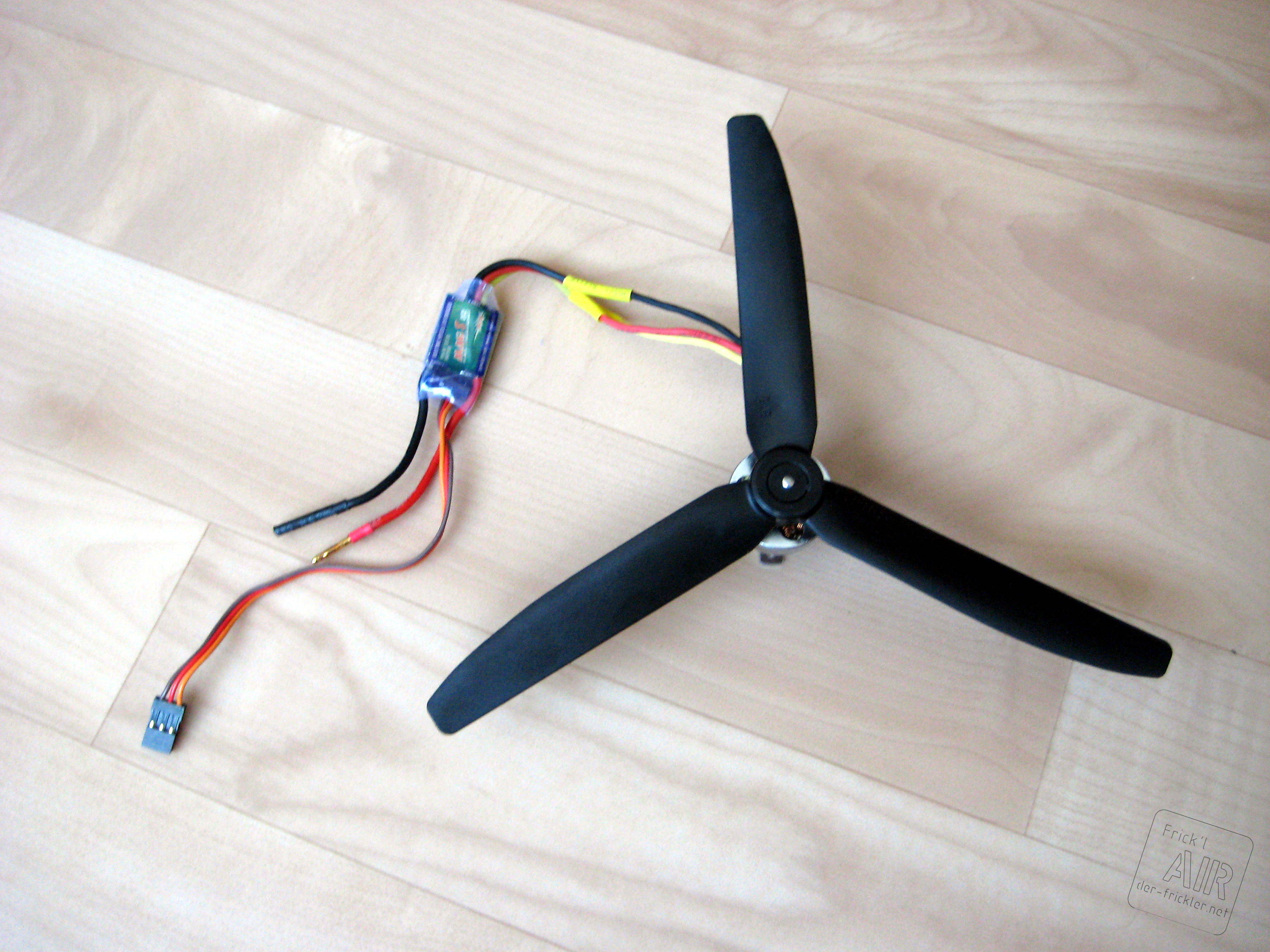
Besteht aus 4 Brushless Motoren mit 1200kV sowie 4 Towerpro MAG8 12a Reglern. Die ATMega8 Prozessoren der Regler wurden mittels angelöteter ISP Schnittstelle neu geflasht so das sie direkt mit dem PWM Signal des UFO Boards betrieben werden können. Die Firmware hierzu stammt von Bernhard Konze alias Quax. Das Problem beim Reglerumbau ist das anlöten der ISP Kabel an die Pins des Kontrollers, da diese nur 0,4mm Pinabstand haben. Außerdem muss ein ARV Programmer zur Verfügung stehen. Der brushless Regler wird dann wie hier beschrieben mit dem UFO Board verbunden.

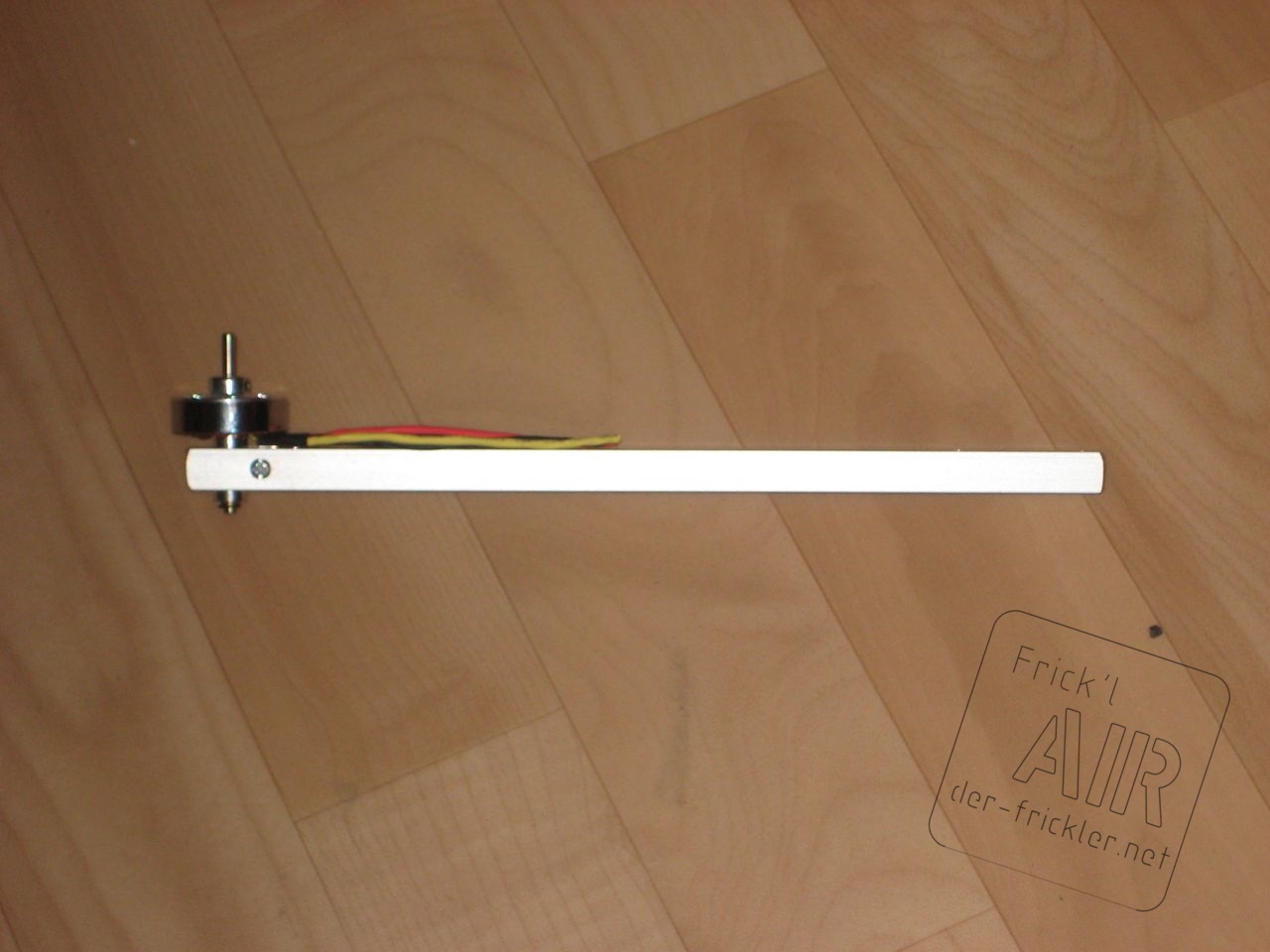
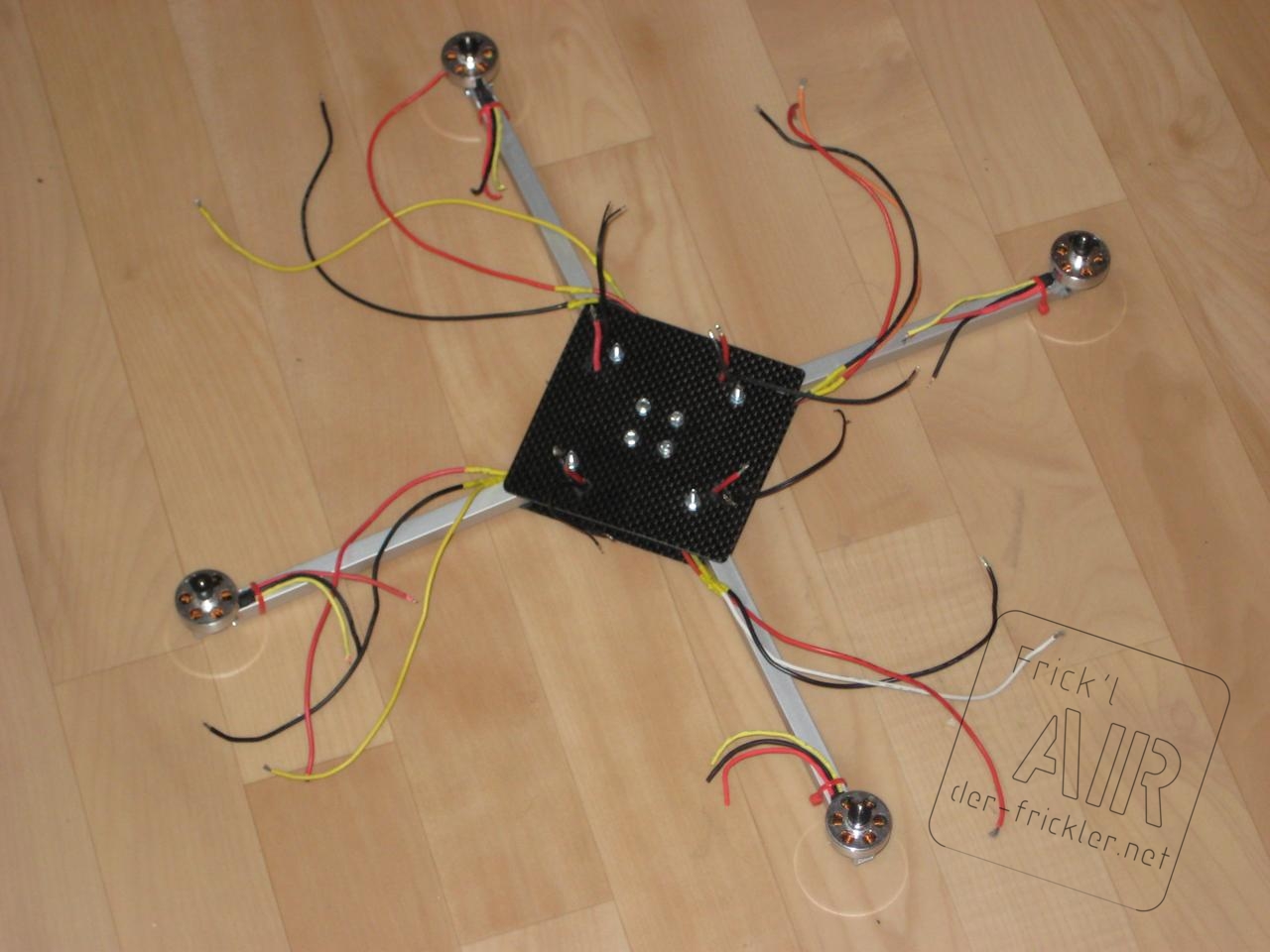
Frame
Der Frame besteht aus 2 CKF Platten 100x100x0,6mm an denen die 4 Ausleger aus Alu 4-kant Rohr 10x10x1mm verschraubt sind. Die Motoren werden direkt in die Löcher des Auslegers gesteckt und mittels Klemmschraube festgezogen. Die Regler liegen später zwischen den beiden CFK Platten, der Akku hängt darunter und die UFO-Platine sitzt oben auf.





Videos
kleines Video von einem der ersten Flüge….
d0ea401cbd74a5bff636