Seitenleiste
Inhaltsverzeichnis
GoFly 45
|
|
|
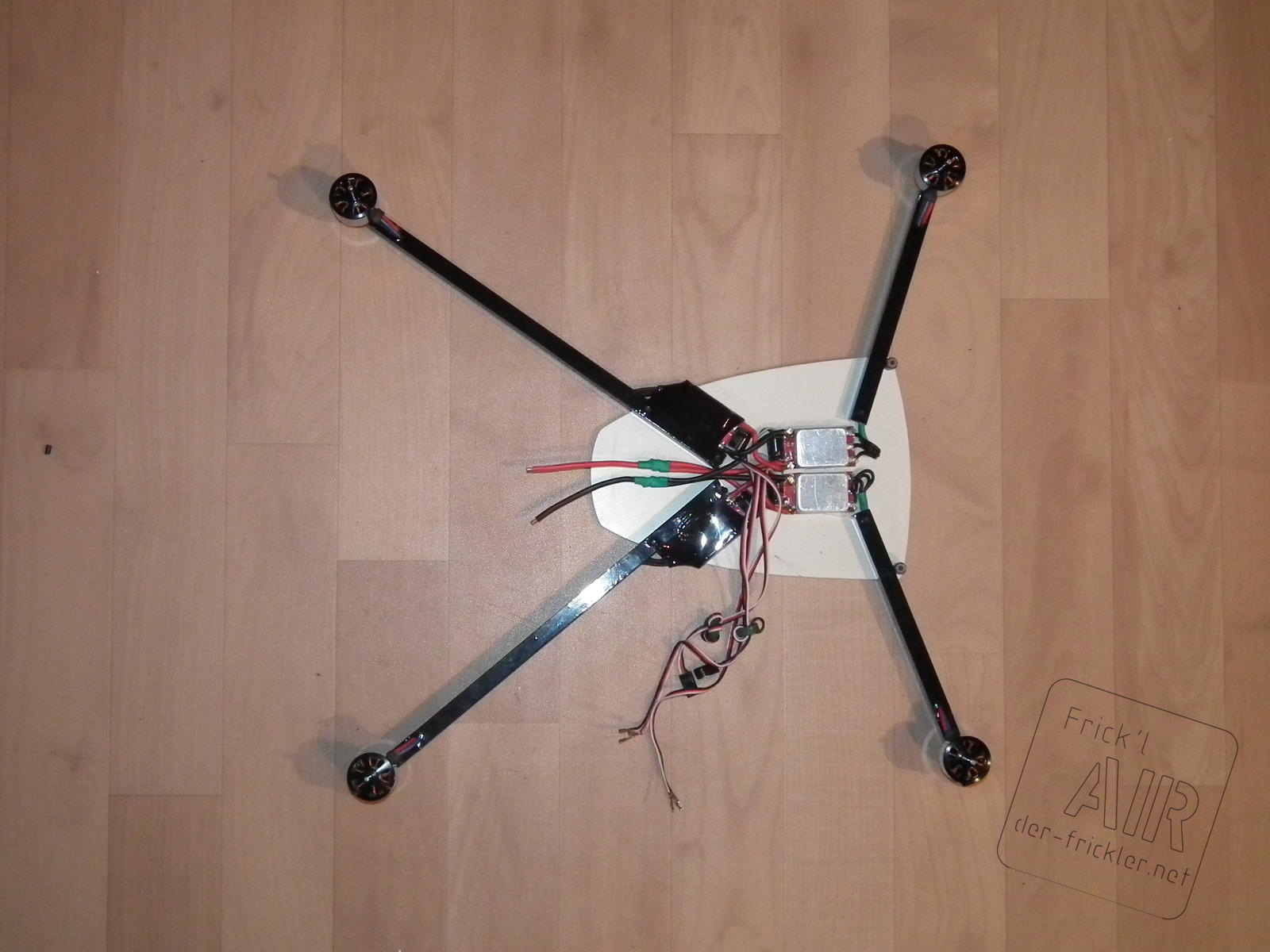
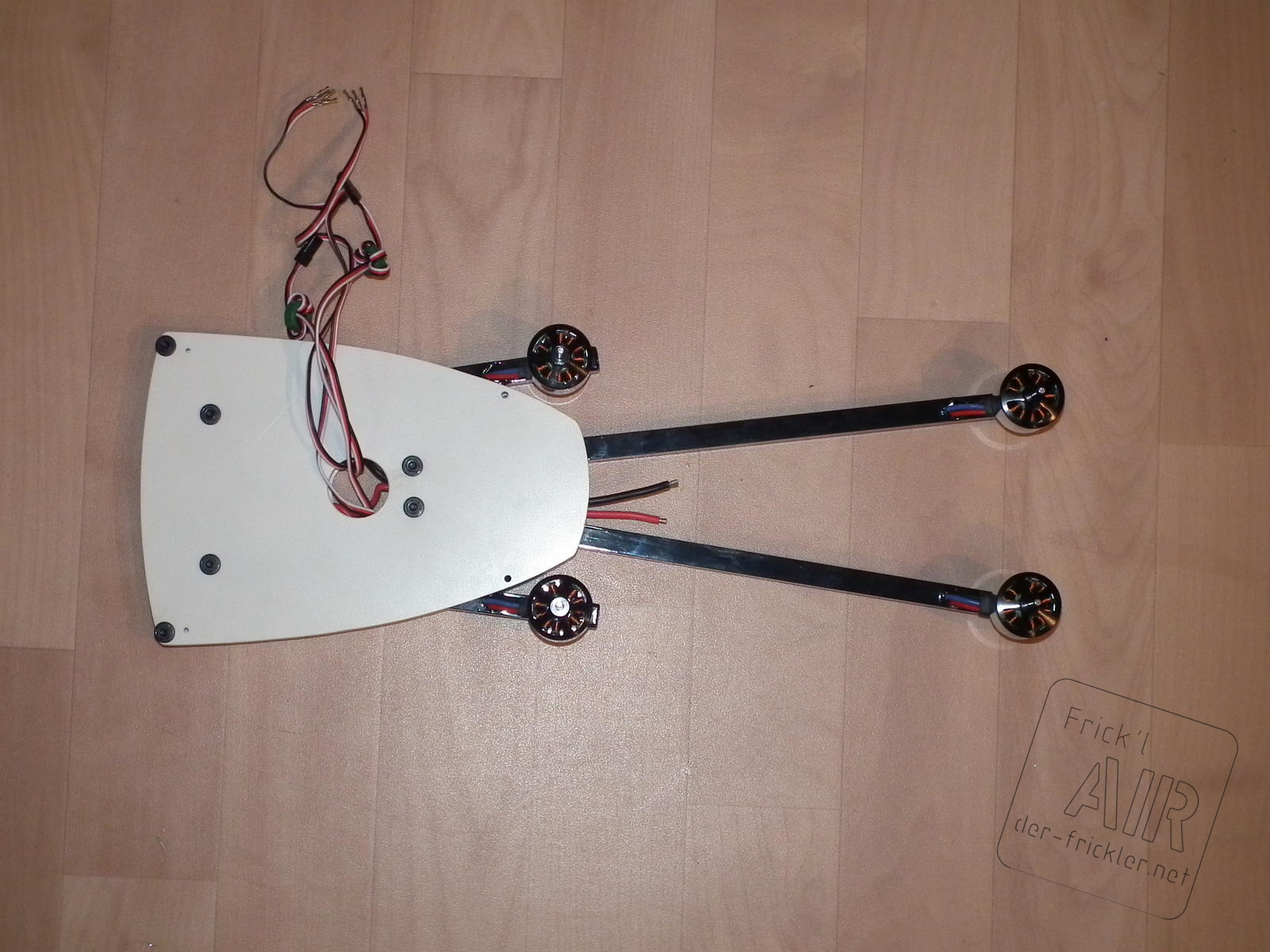
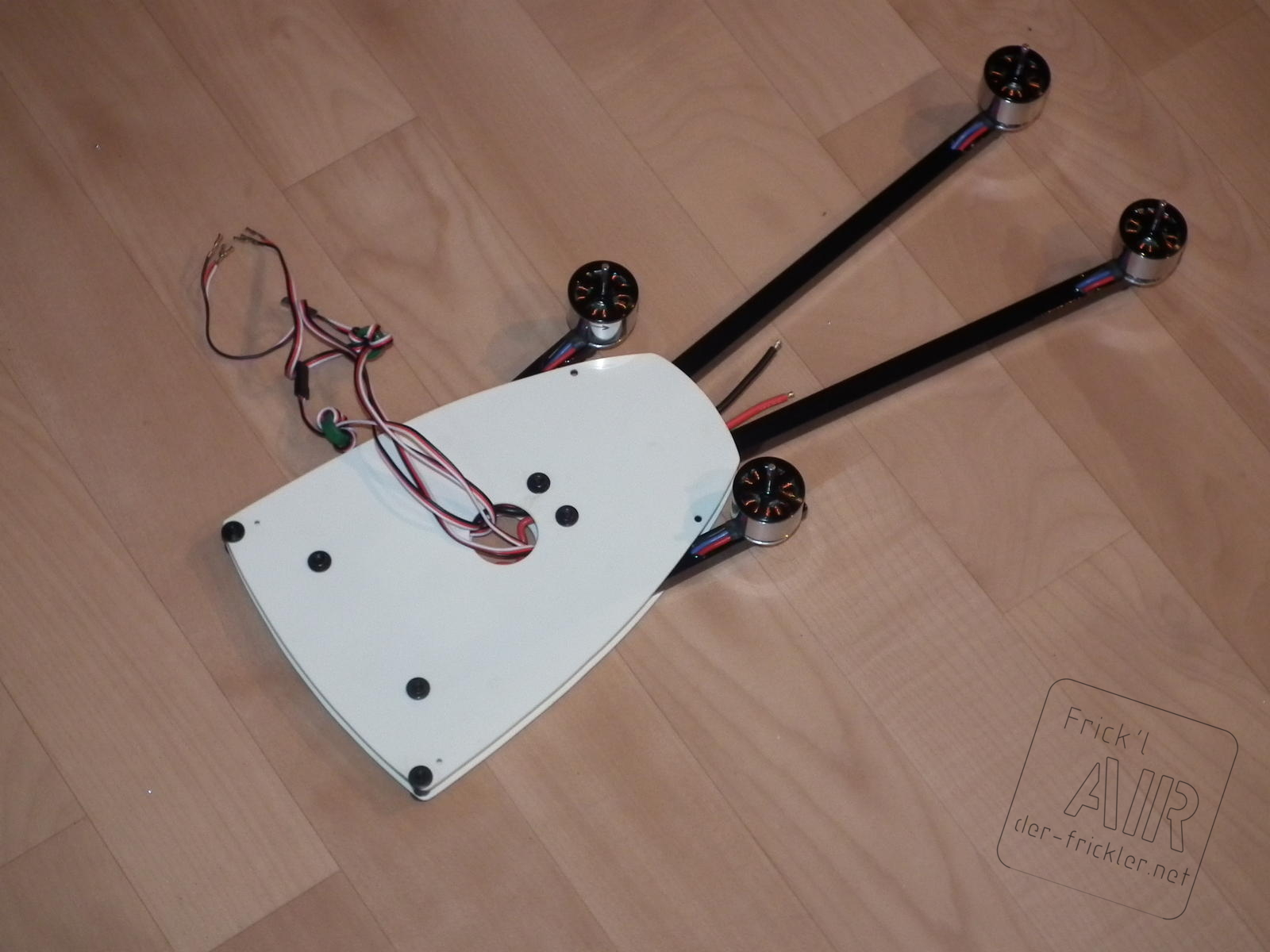
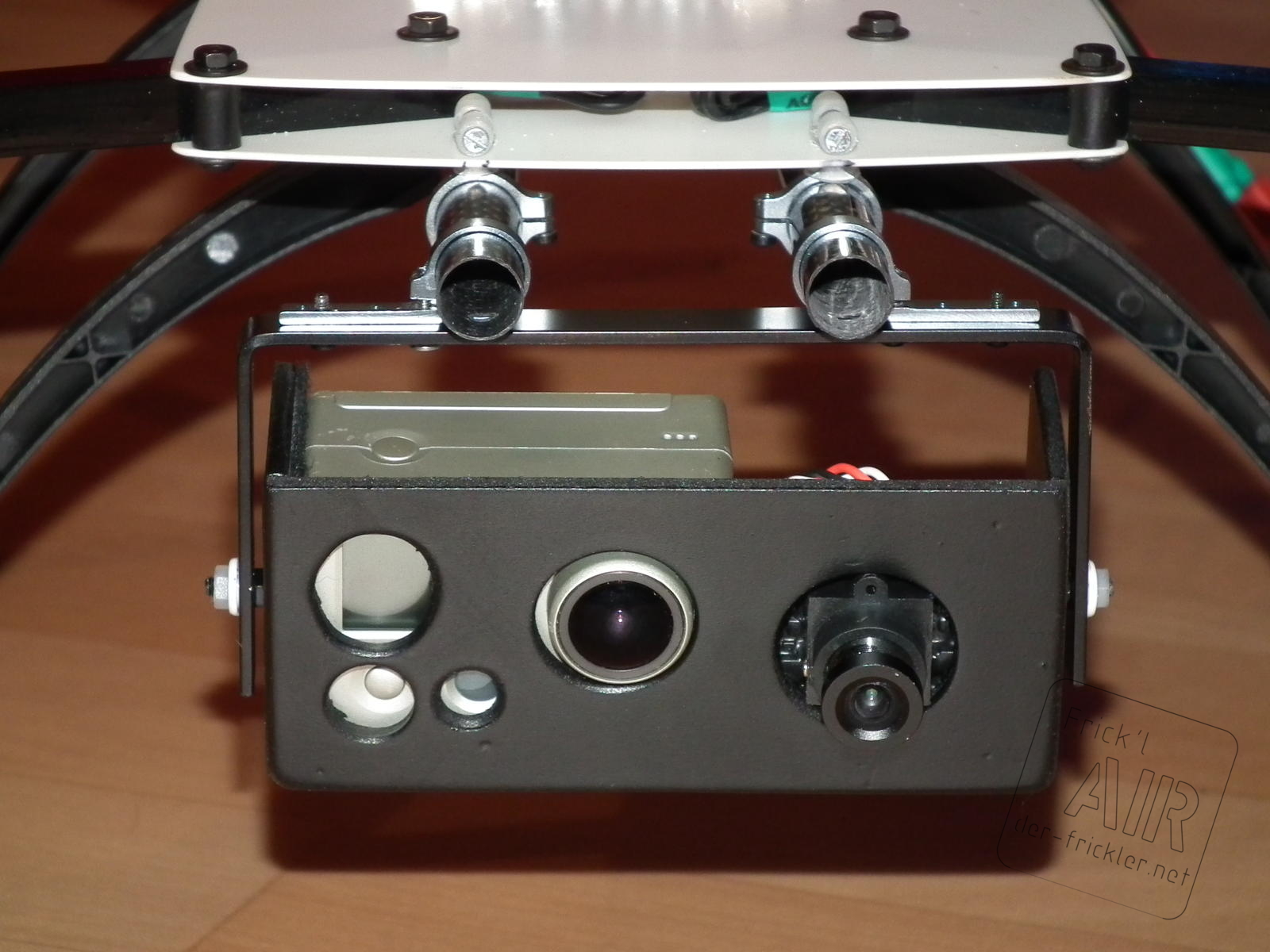
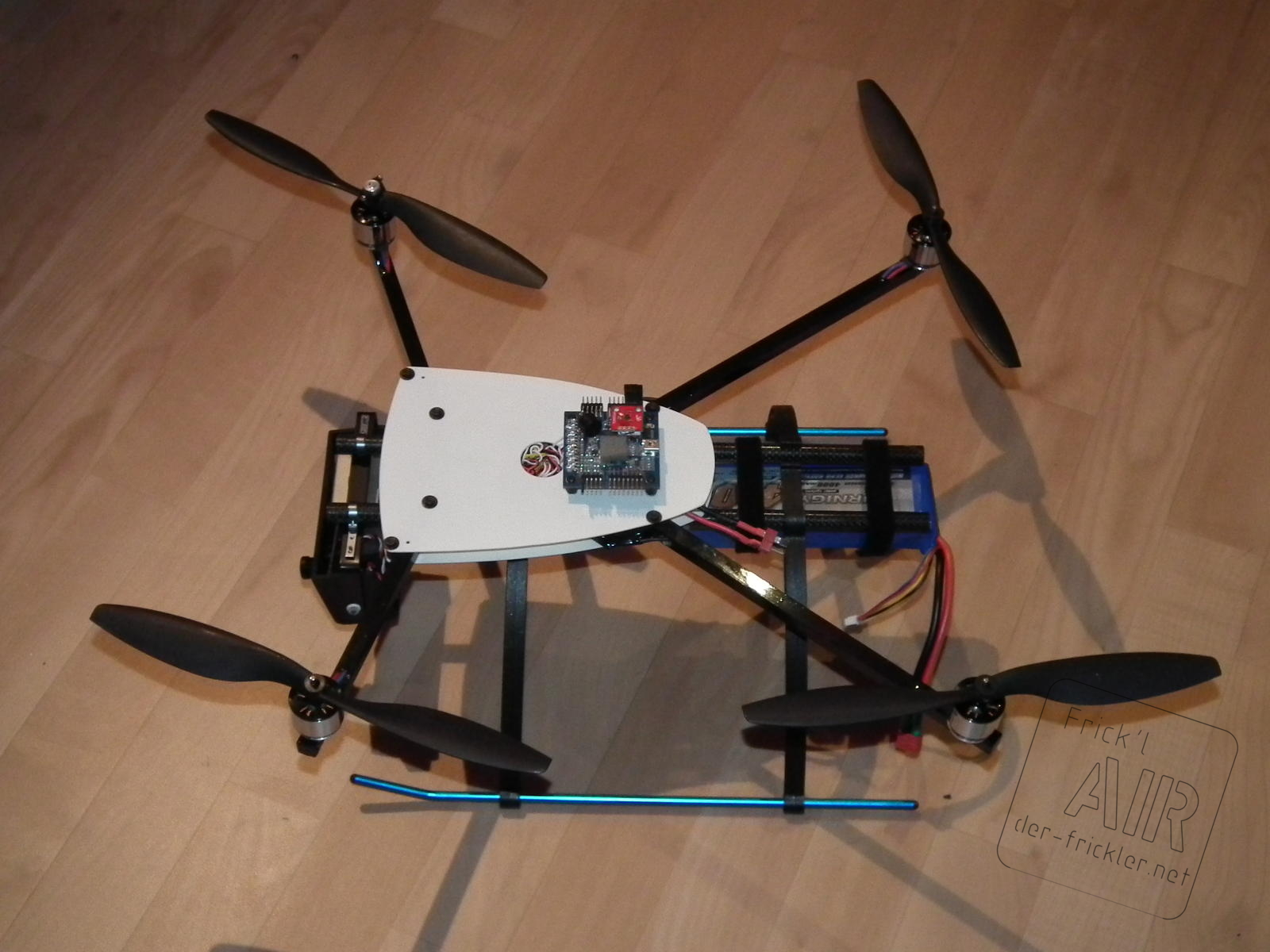
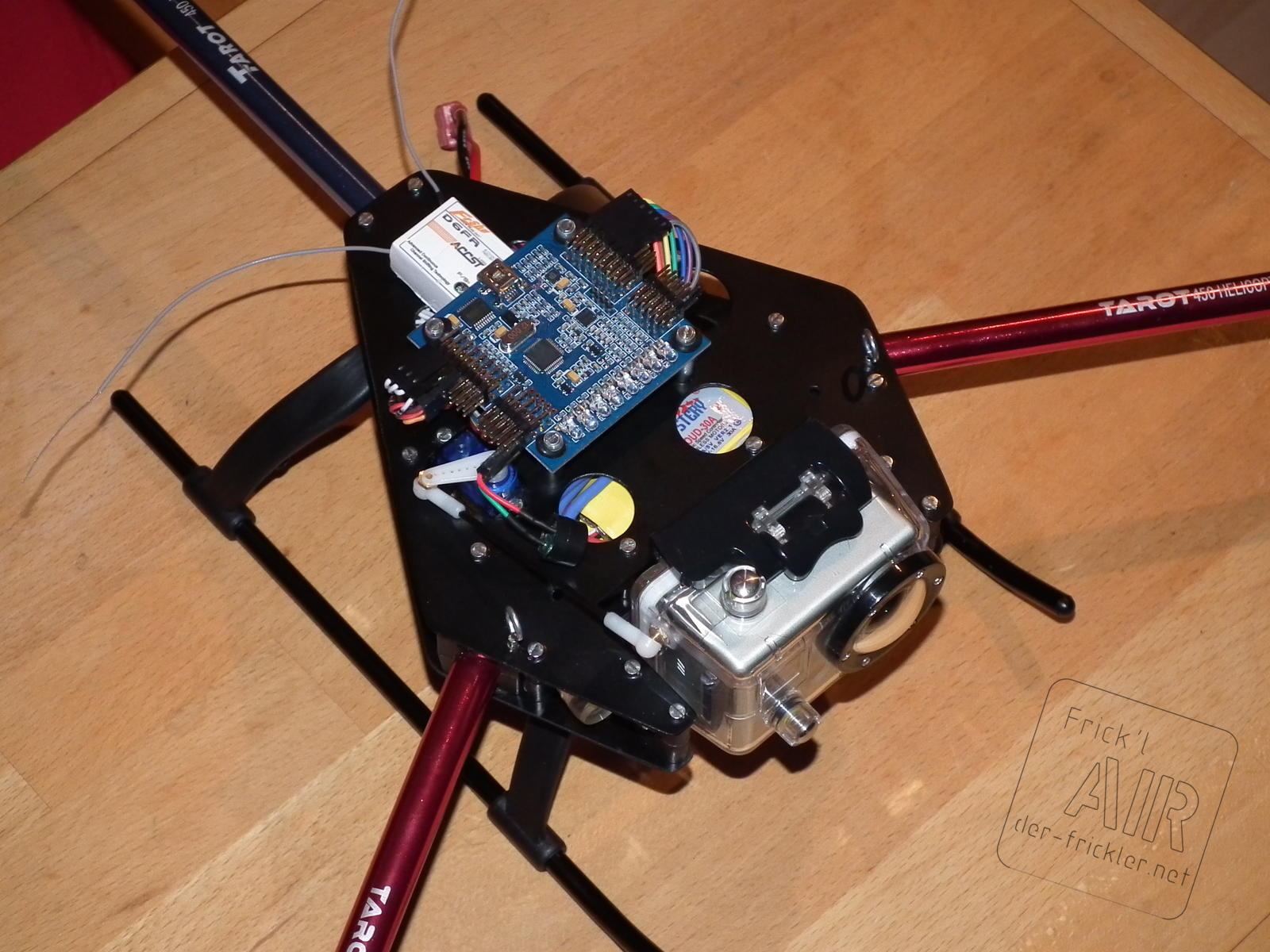
So, was lange währt wird endlich gut, endlich hab ich es mal geschafft den Größeren GoFly45 soweit flugfertig bauen. Der GoFly soll etwas größer als der GoFly 2 werden, so das er die Gopro + FPV-Cam locker schafft, später soll mal ein richtiges Gimbal und evl ne andere Digicam für Luftaufnahmen rauf. Trotzdem sollte der GoFly weiterhin recht Platzsparsam transportierbar bleiben.
Erste Testflüge eben auf der Terasse sahen sehr gut aus, der Kopter hat genug Dampf, reagiert sehr schnell, trotzdem steht das Rabbit auch bei viel Wind prima in der Luft. Bin auf die ersten echten Flüge gespannt…
Heute kam endlich der größte Bruder zum Test, erster wirklicher Außentest mit dem Rabbit auf dem Gofly 45. Fliegt sich wirklich Zahm mit dem Rabbit und steht schön in der Luft. Auch wenn die 1.3kg beim ersten fliegen schon etwas Adrenalin fließen lassen, er zieht ruhig seine Bahnen, kann aber auch gut Speed geben. Im reinen Schwebeflug machen die 10er Props einen schönen leisen aber satten Sound. Die Cam muss noch besser entkoppelt werden, ich habe noch deutliche Vibrationen drin. Beim nächsten mal kommt hier auch der FPV Sender ran.
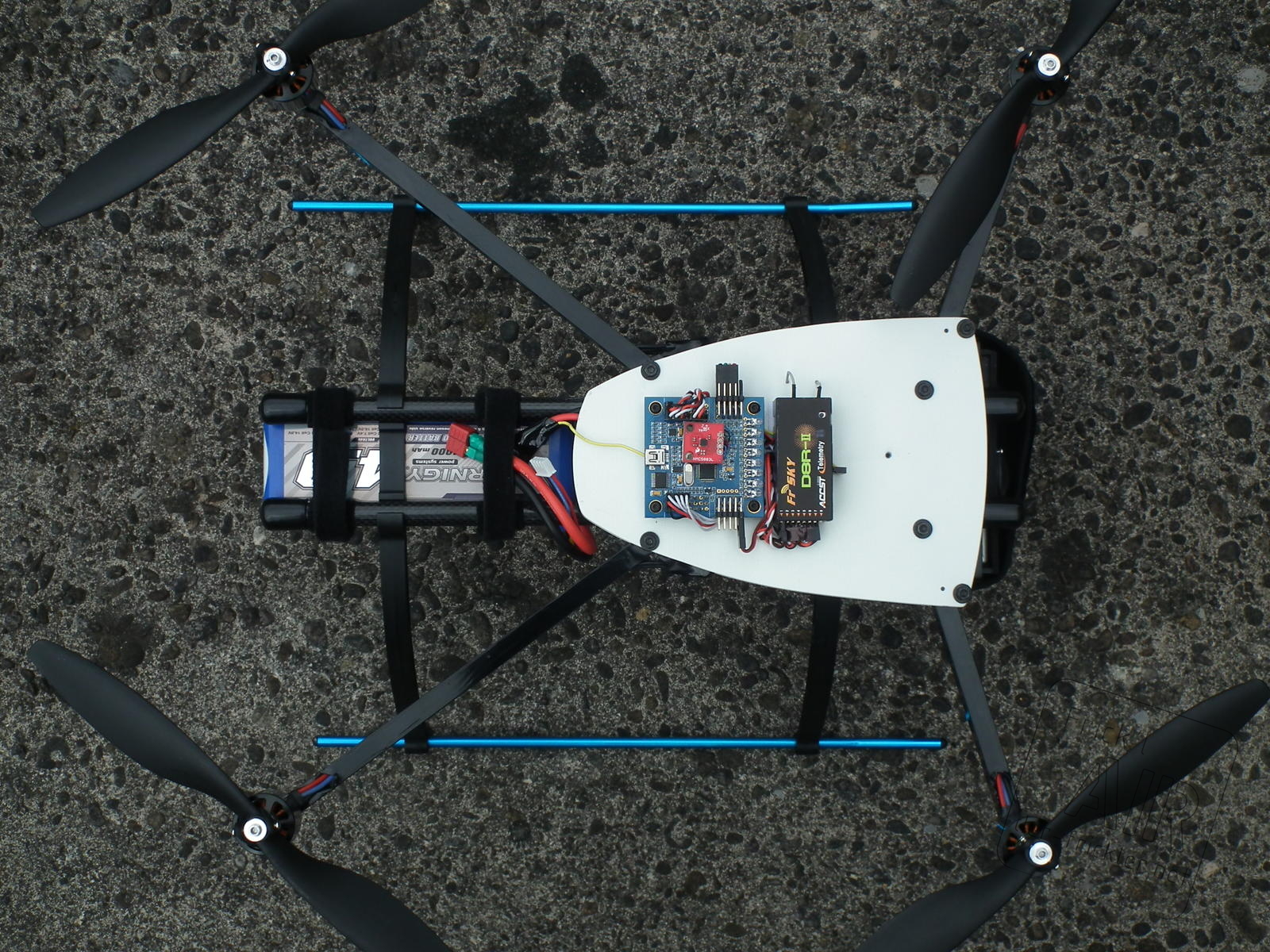
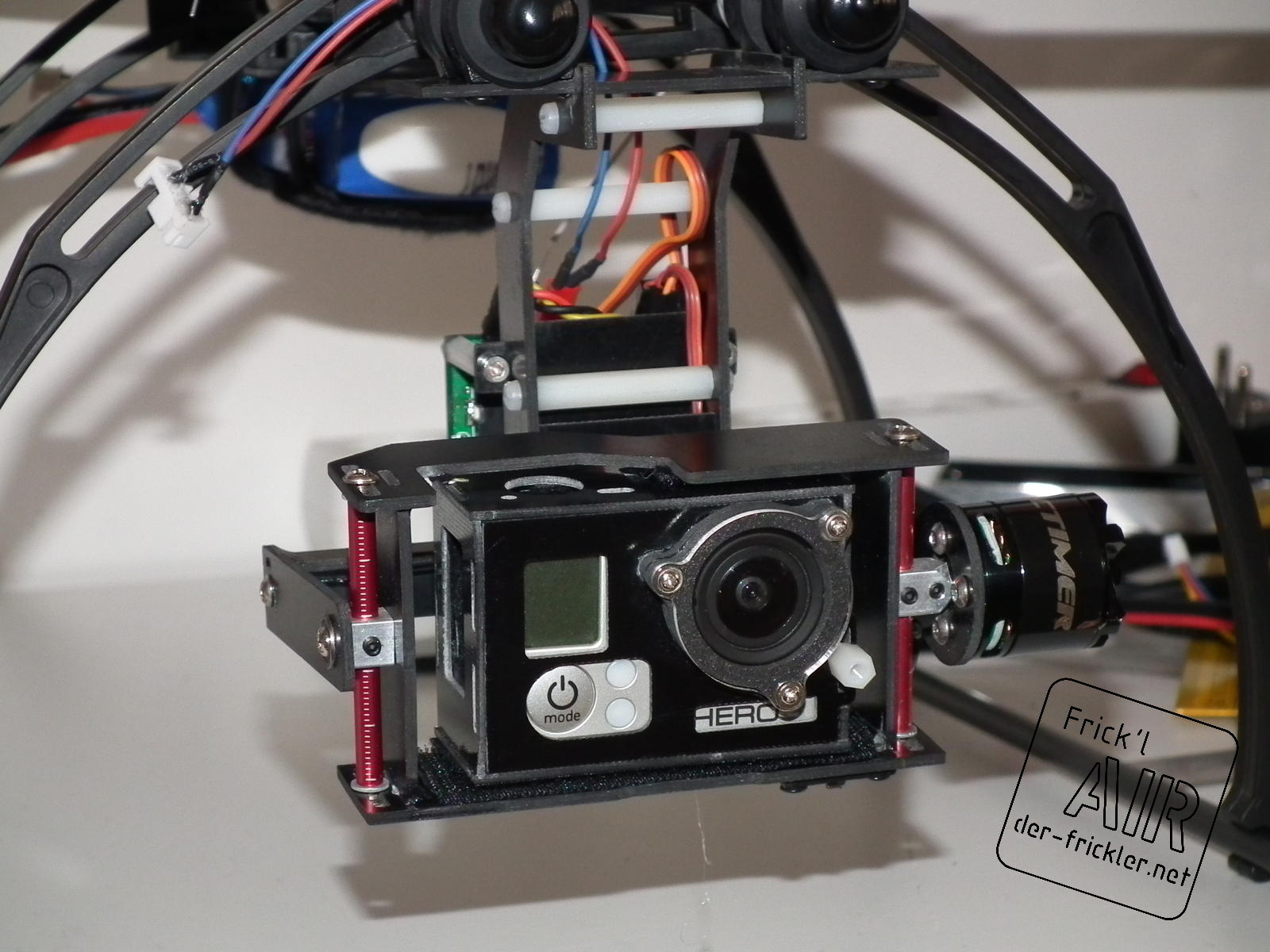
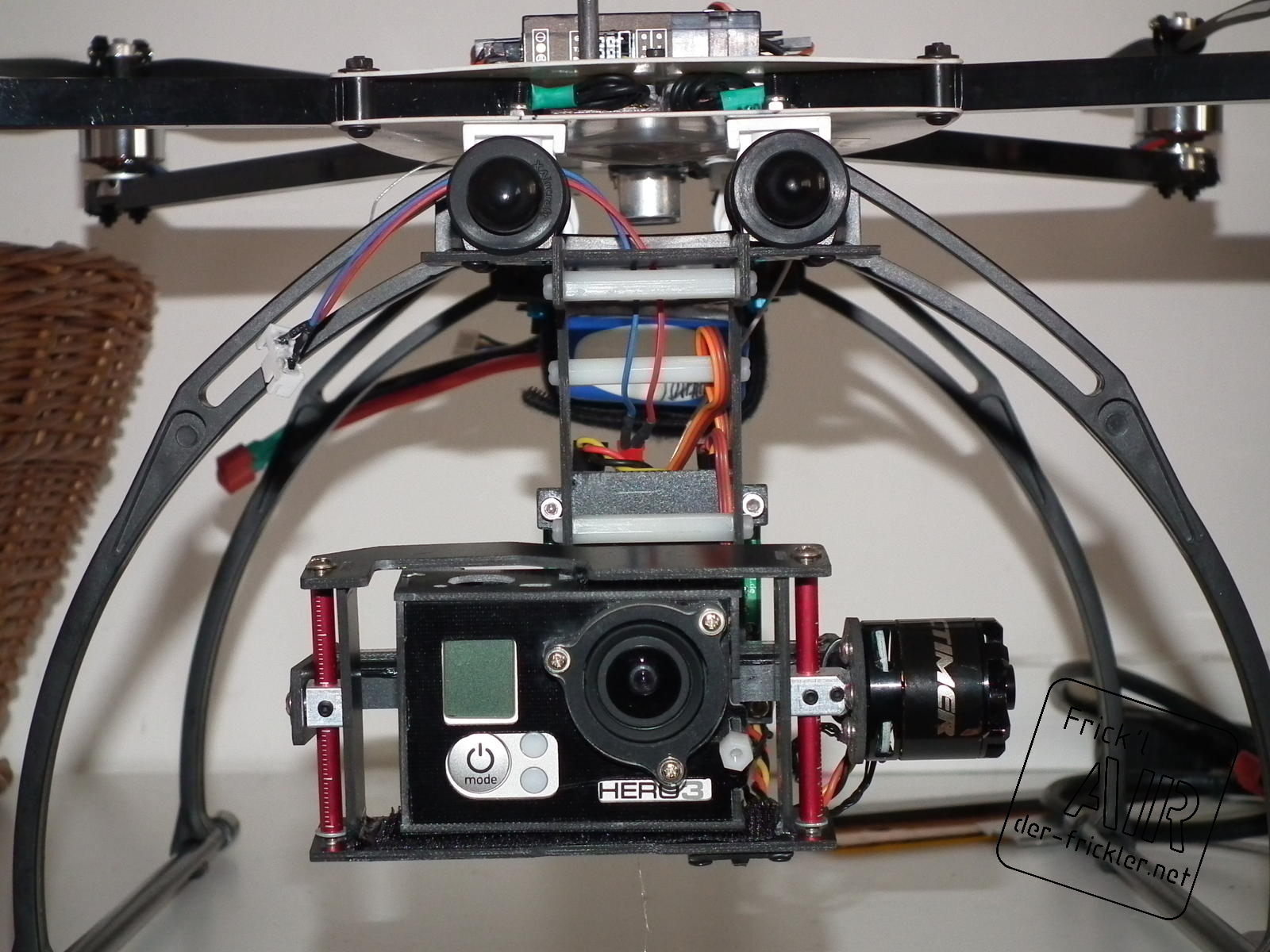
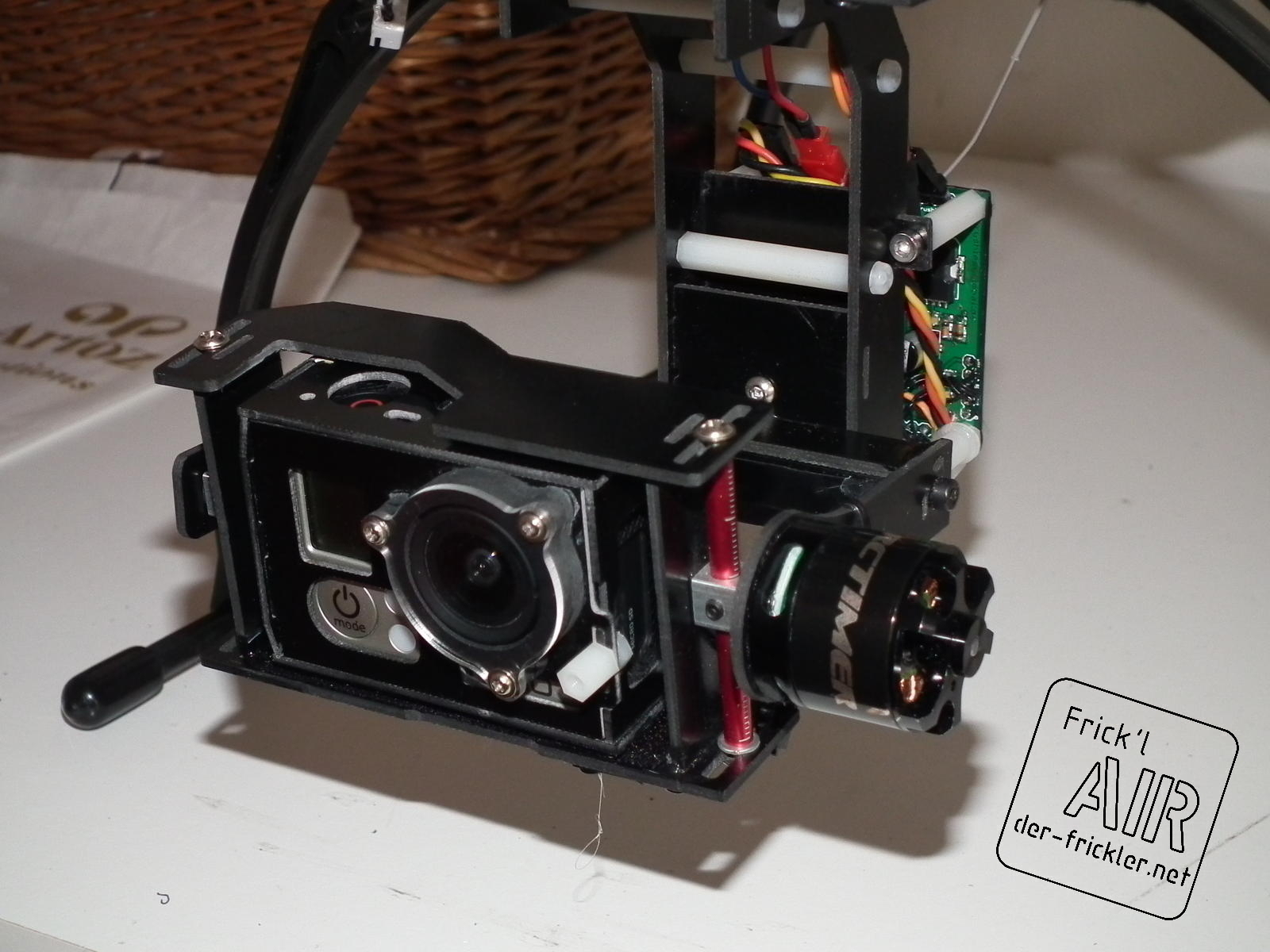
So, nach dem der Gofly45 jetzt lange rumstand wurde es mal wieder Zeit für ein paar Upgrades. Er darf als Testplattform für mein erstes Brushless Gimbal herhalten und bekommt ein GPS ans Rabbit.
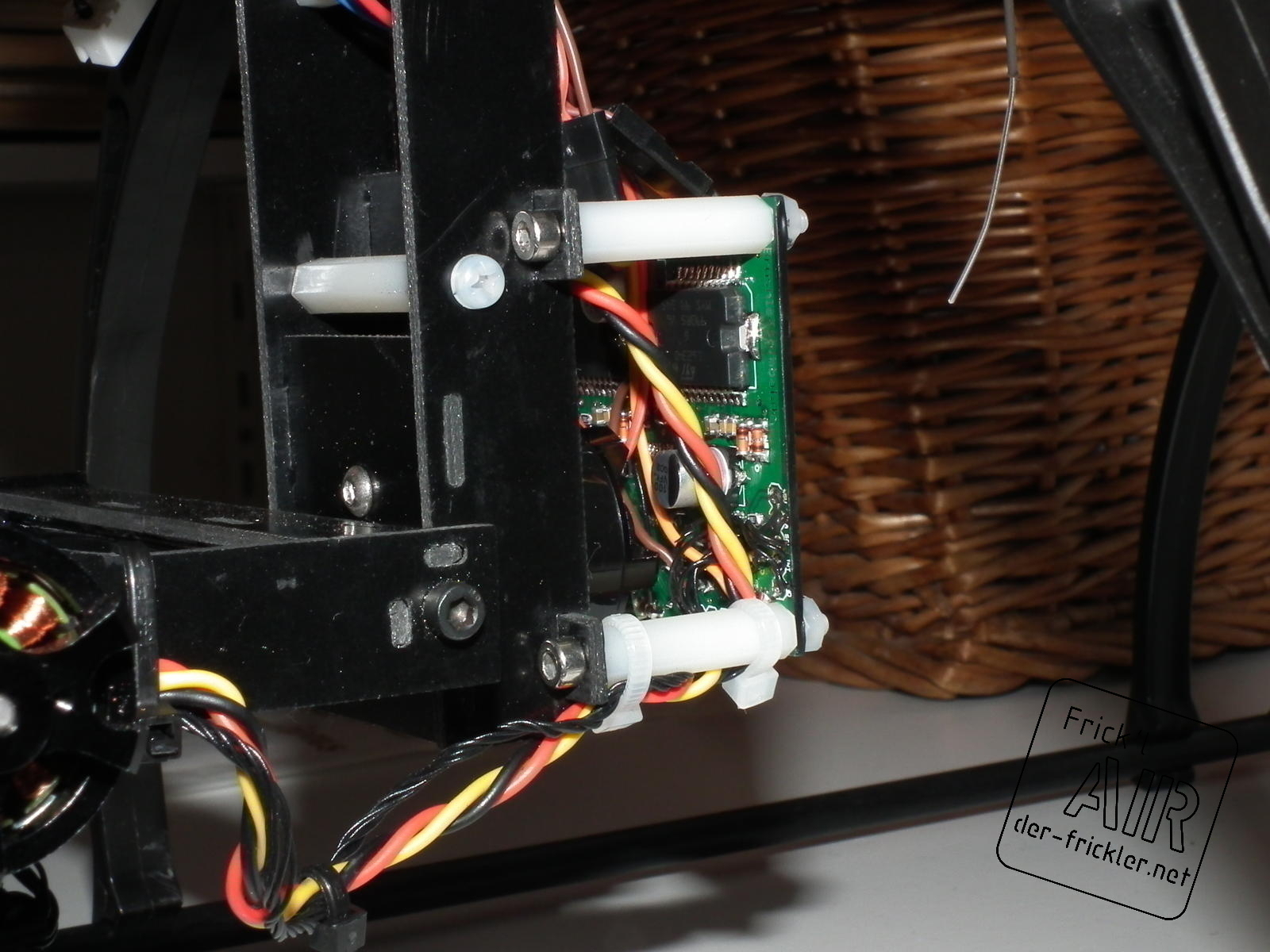
Das Gimbal war mit ca 20USD bei goodluckbuy so billig das ich erstmal auf den Eigenbau verzichtete. Die Motoren sind 2212er stammen von rctimer. Die Brushless-Gimbal Platine wurde von einem Bekannten fertigen lassen und von mir selbst bestückt, geflasht und eingestellt.
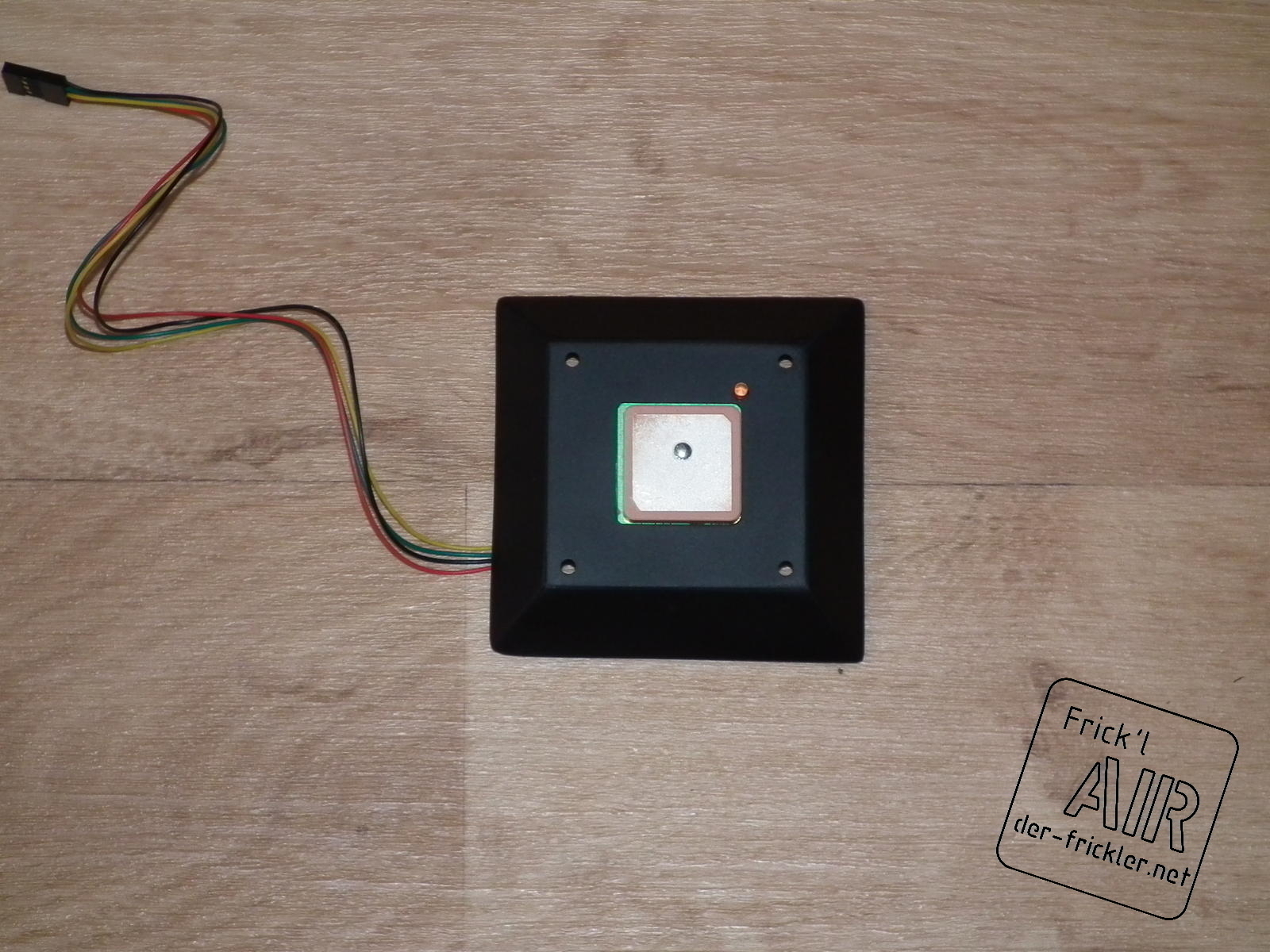
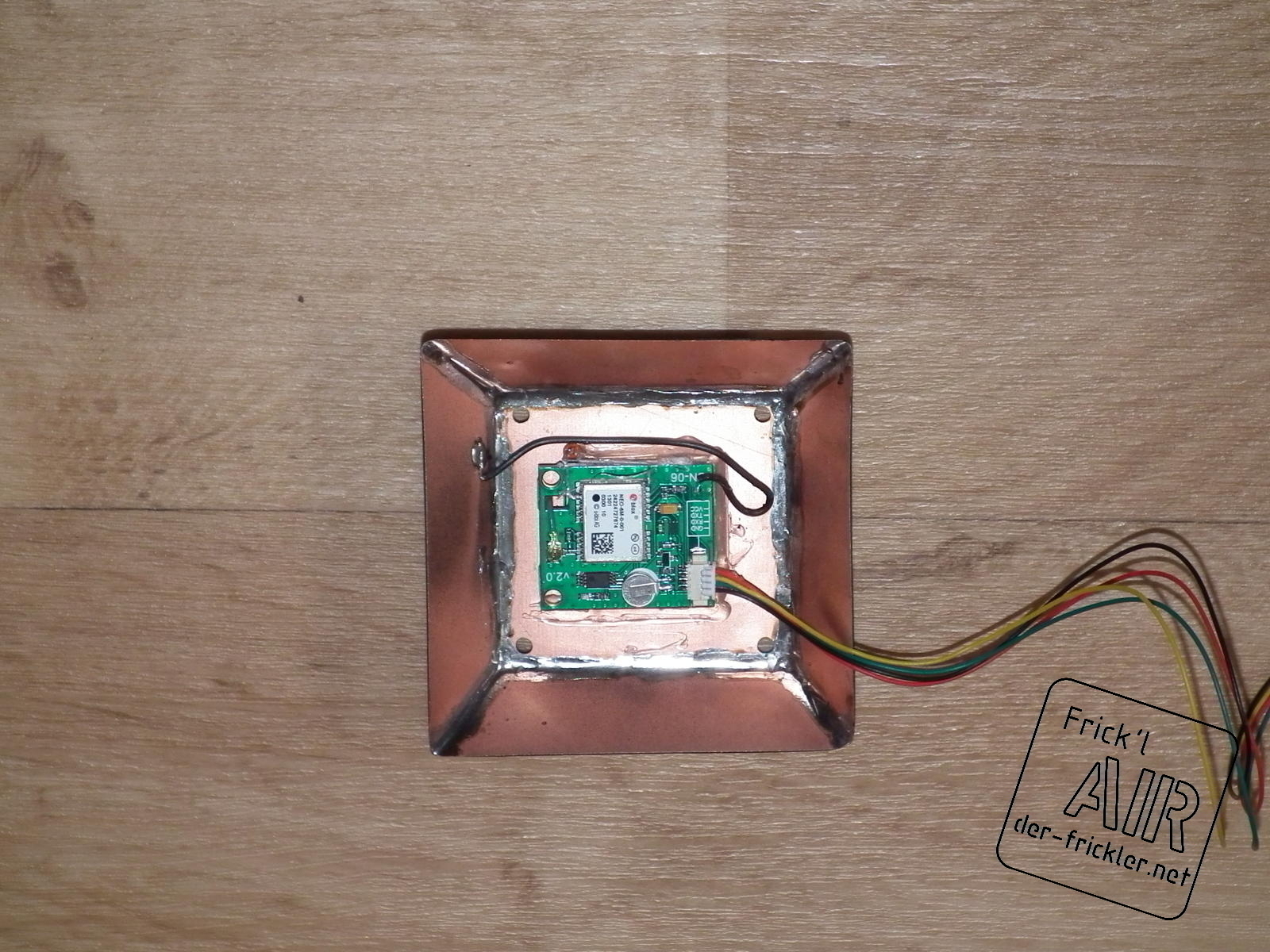
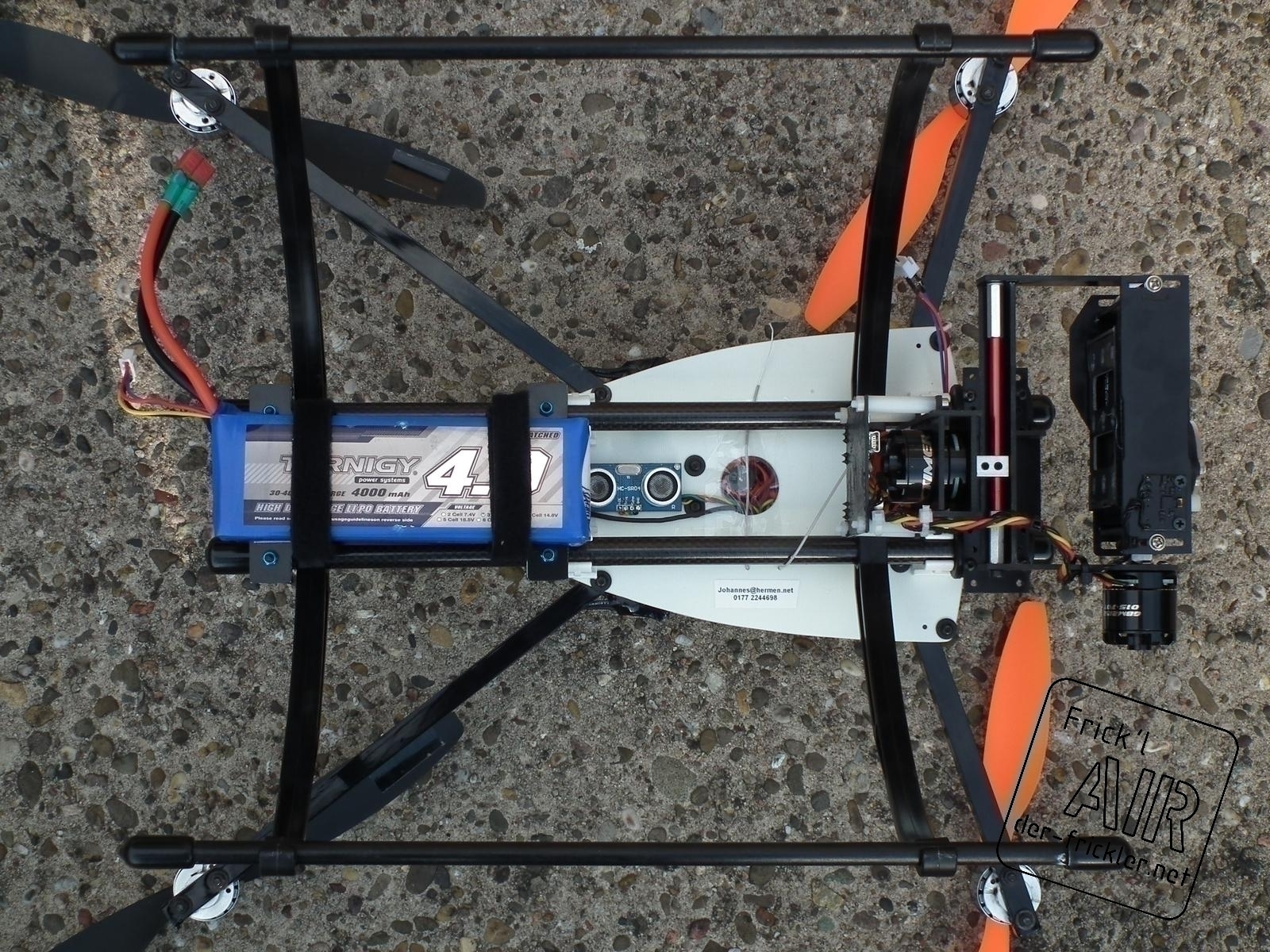
Das Crius µBlox GPS von rctimer bekam einen Shield aus 0,5mm GFK mit Kupferbeschichtung und kommt nun über die FlightControl. Ich bin gespannt wie das ganze am Rabbit funktioniert.
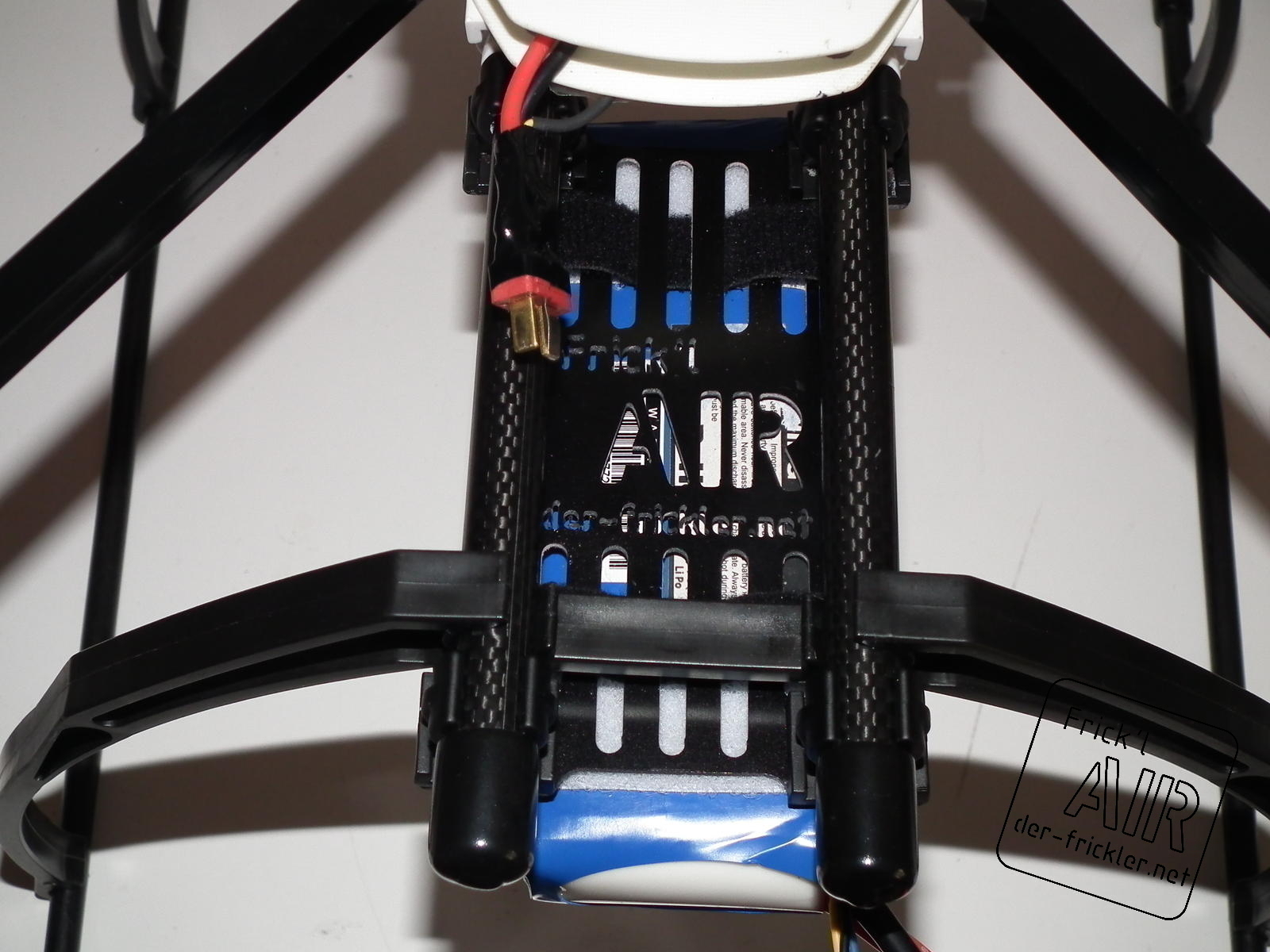
Da ich gerade dran war bekam der Kopter auch endlich mal eine würdige Akkuplatte auf der später auch noch der FPV Sender Platz haben wird.
Kopter wurde aufgrund anderer Projekte ausgeschlachtet….
Fotos:
















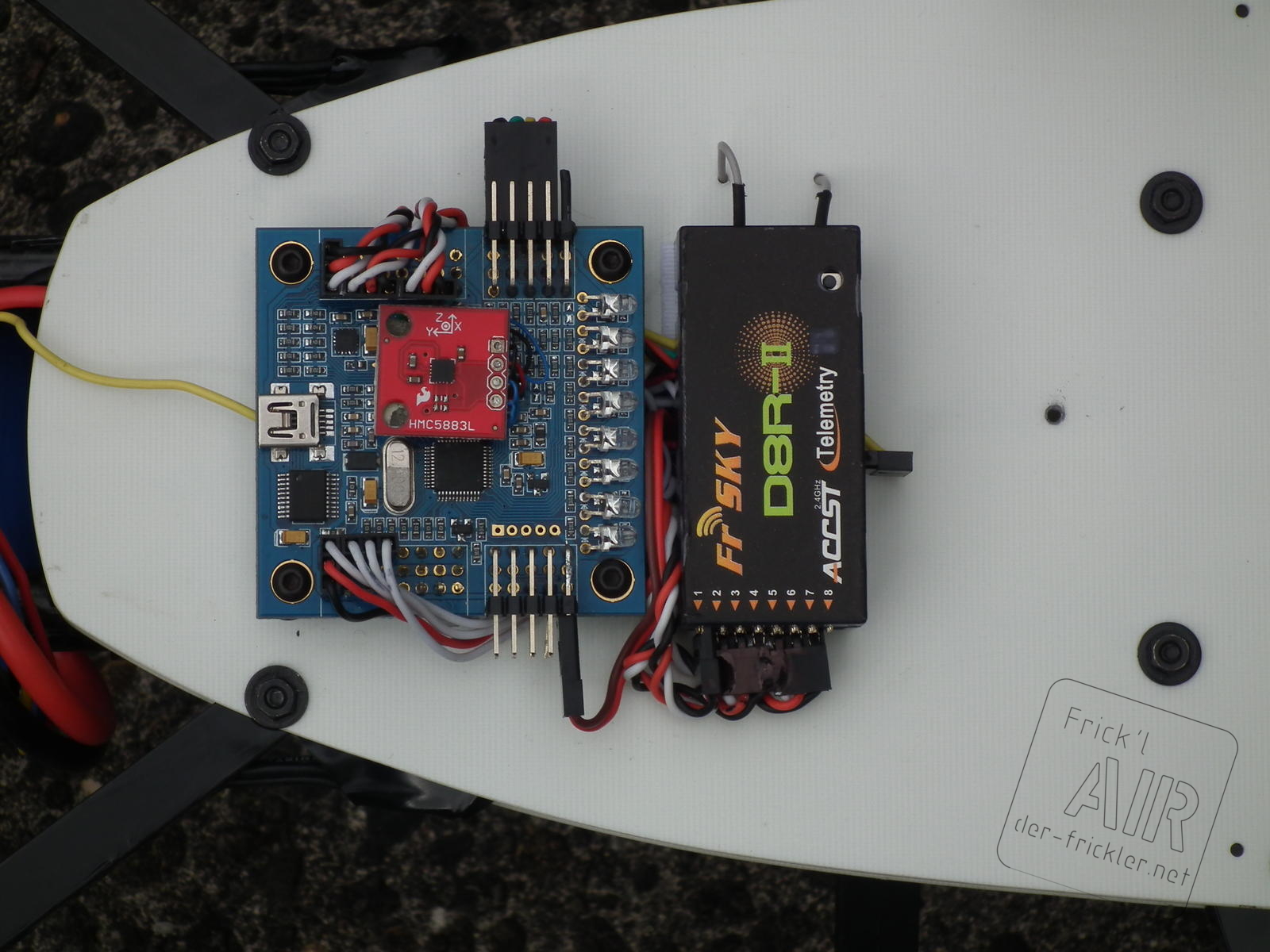


















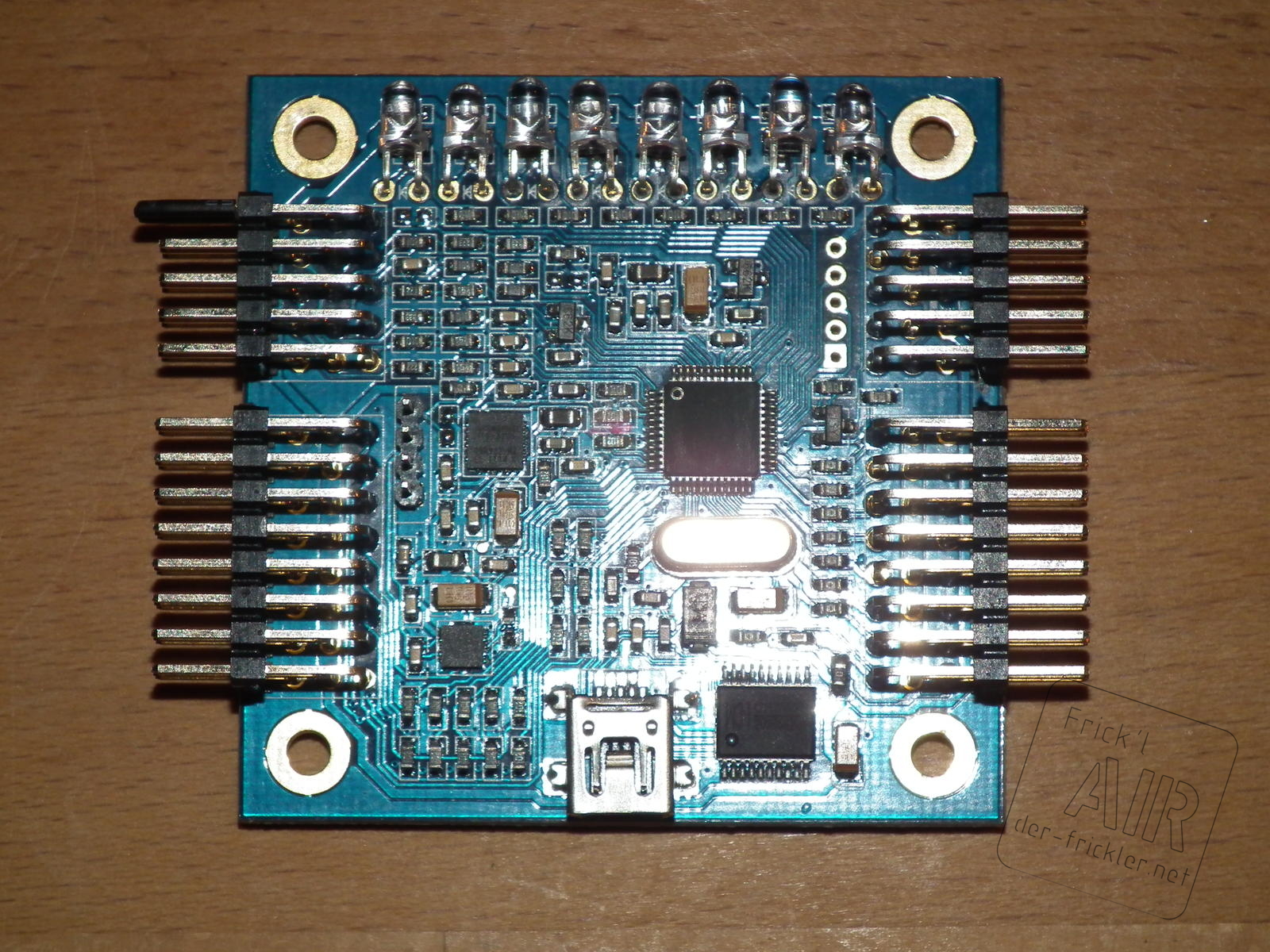
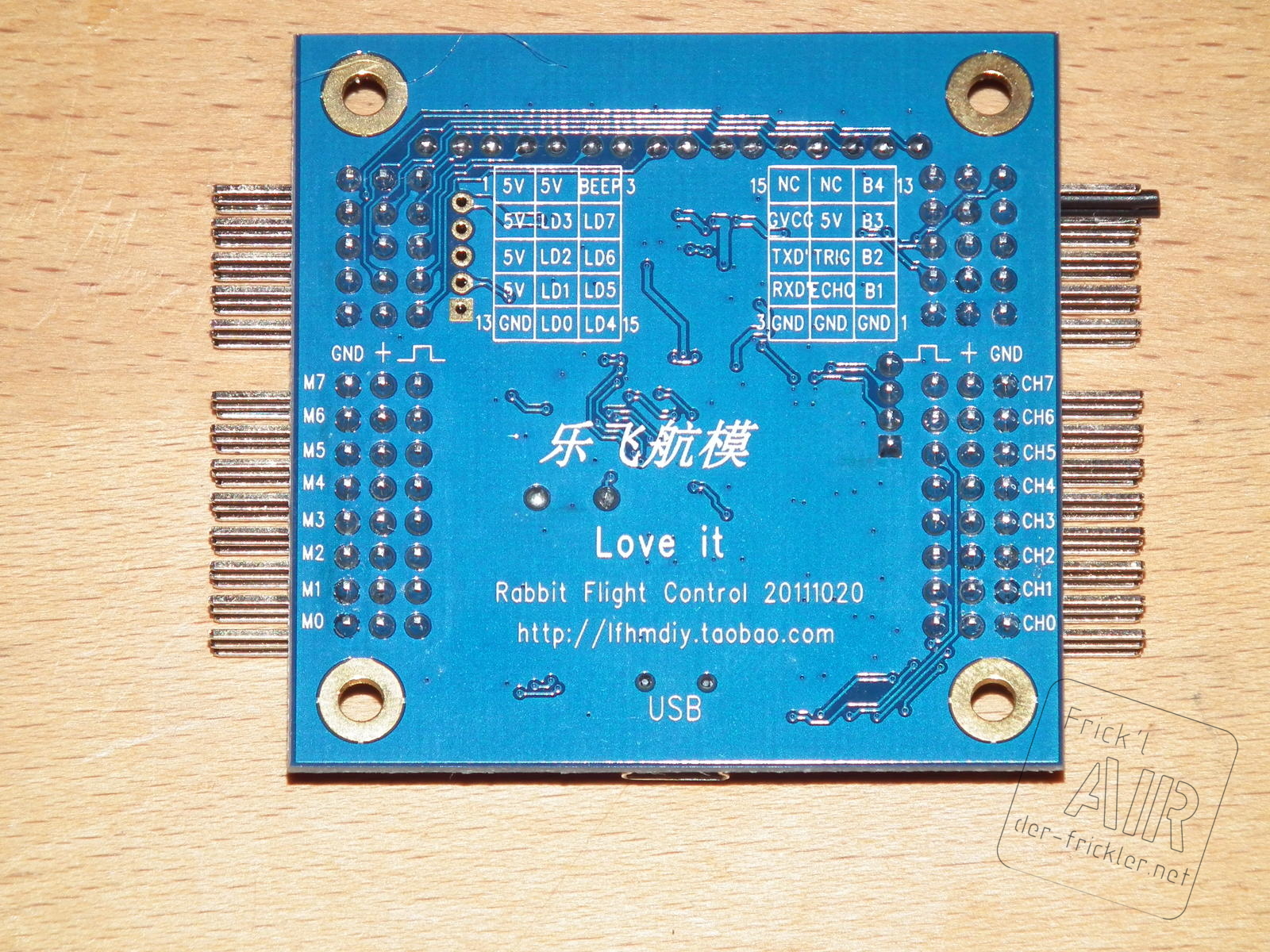
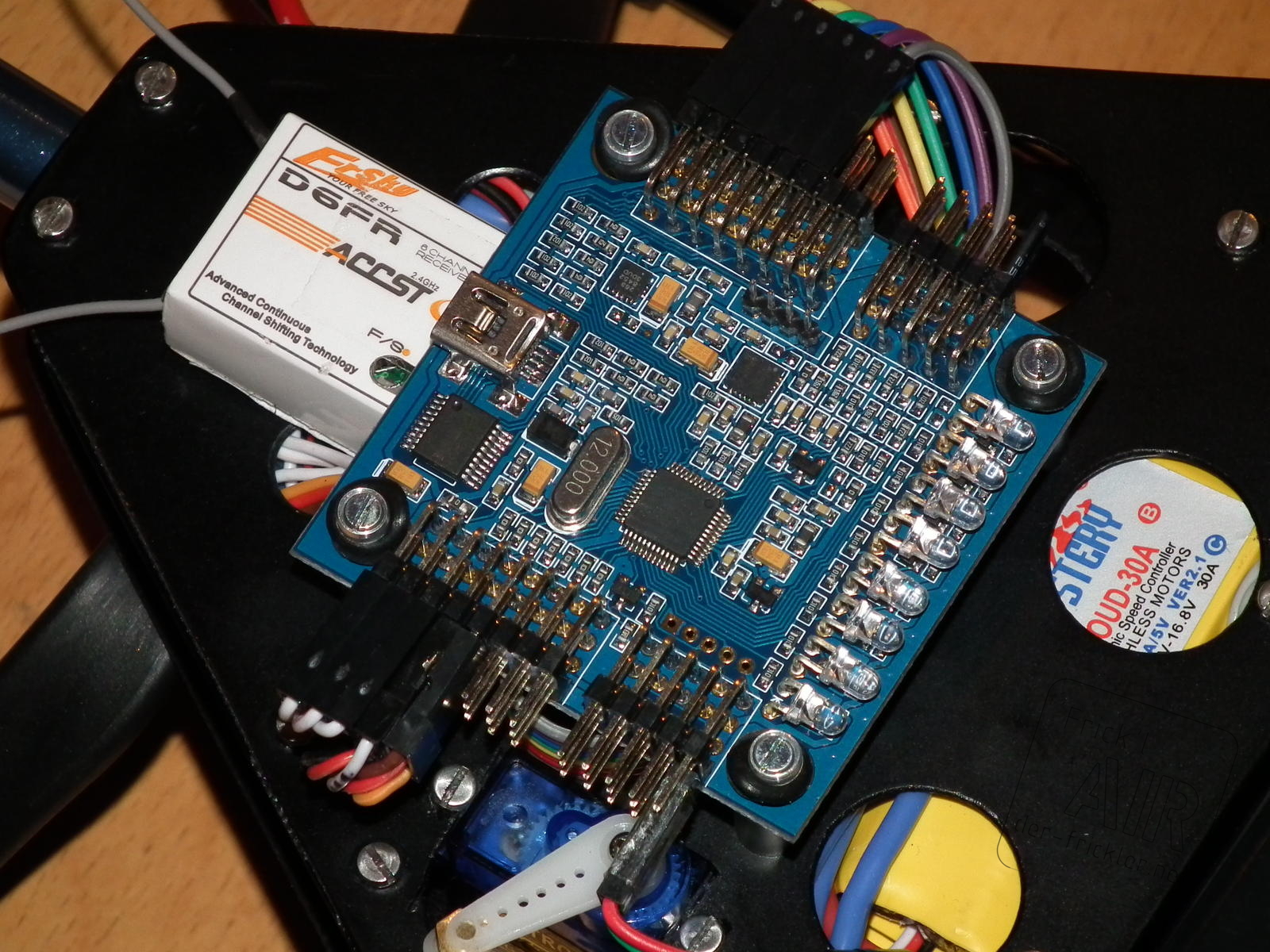
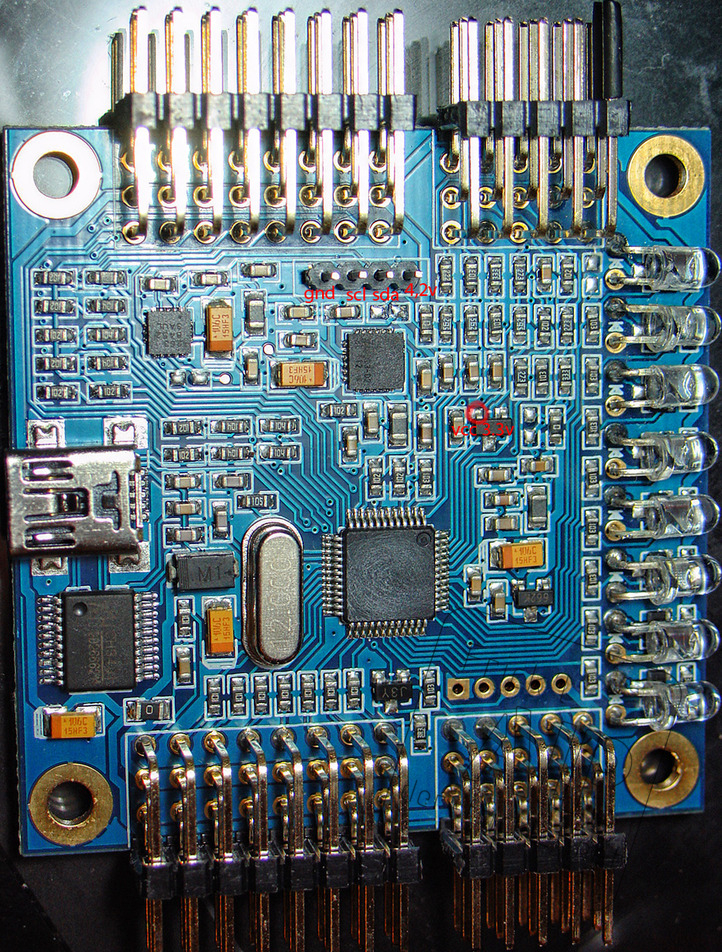
Rabbit Flight Controller:
Da ich ja immer gerne Rum-experimentiere und auf der Suche nach einem FC für meinen neuen Y4 Copter war fiel mir an Weihnachten das neue Rabbit Board von GoodLuckBuy ins Auge:

Features:
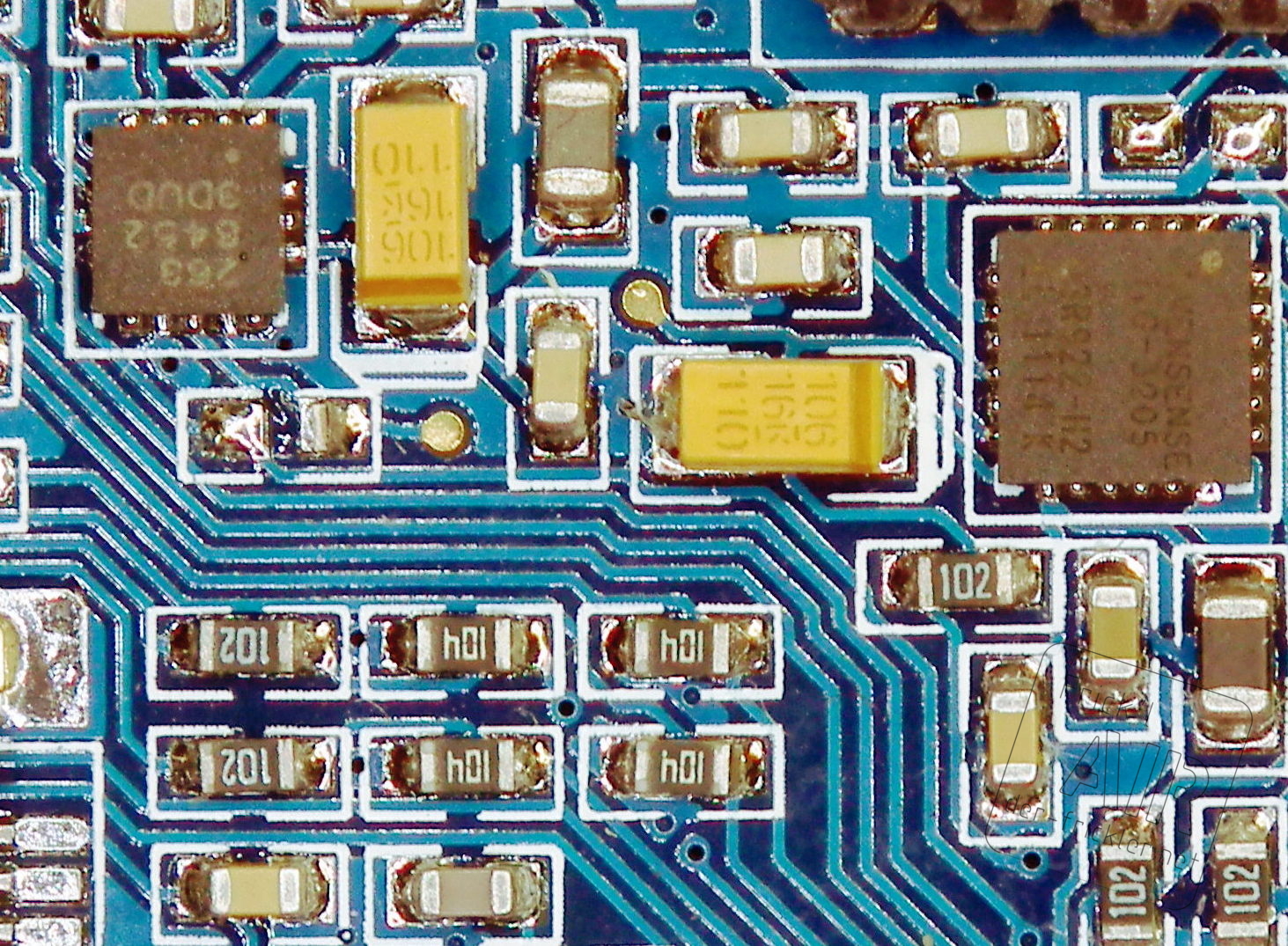
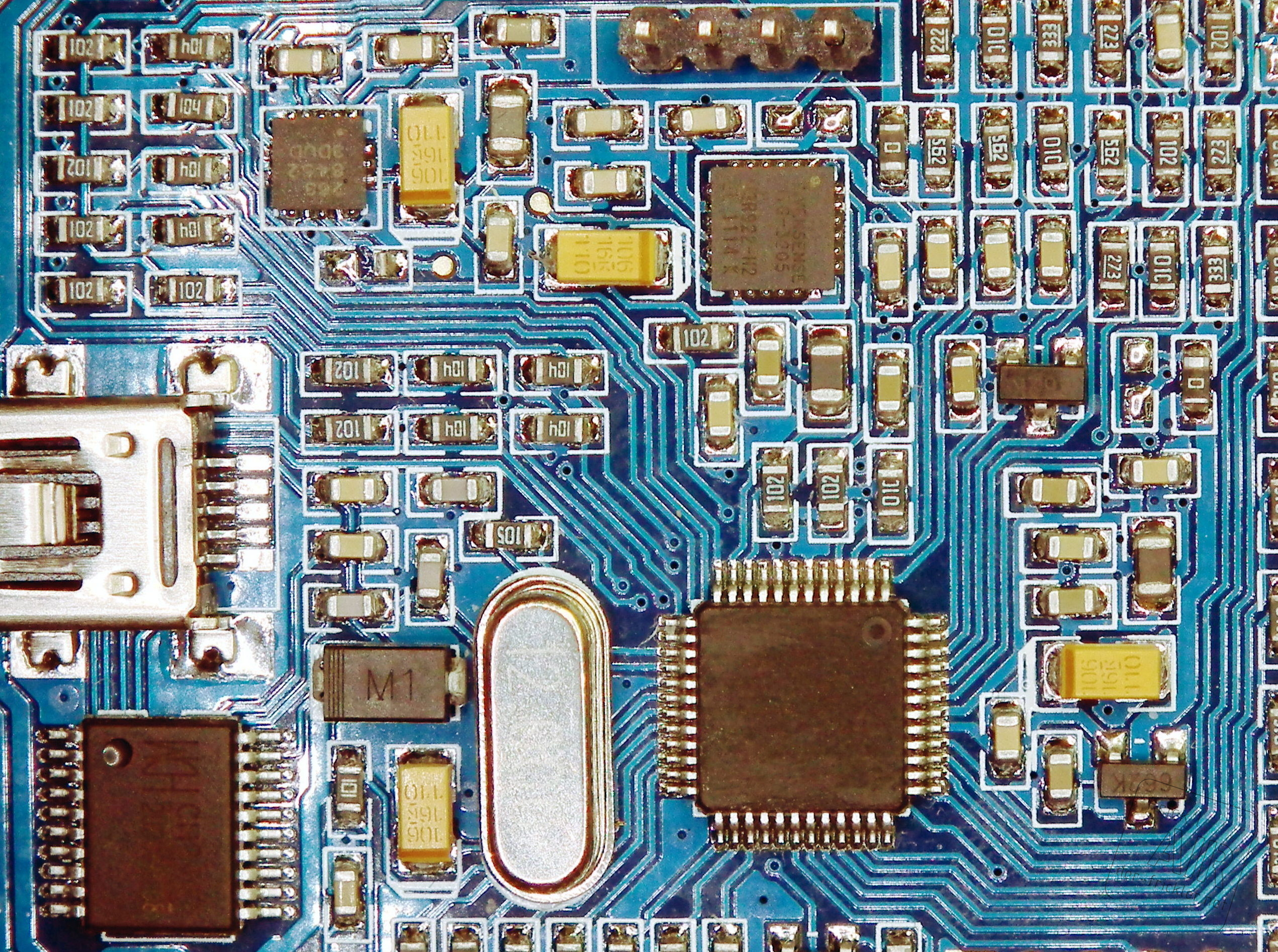
- 32 bit 50 MHZ ARM CPU
- 3-Achs Gyro (Invesense ITG 3205) und ACC (MMA8452Q) von Werk aus, Erweiterbar mit Baro, Ultraschall, Kompass und wohl GPS.
- 8 Ein und Ausgänge,
- Kann alle soweit alle Kopter konfigurationen
- 2ch Cam-Stabi (außer beim Okto)
- USB zur Configuration am Rechner
- Einzelzellenüberwachung des LiPos
und am wichtigsten: 8 Leds und Led Ausgänge mit wilden Lichteffekten
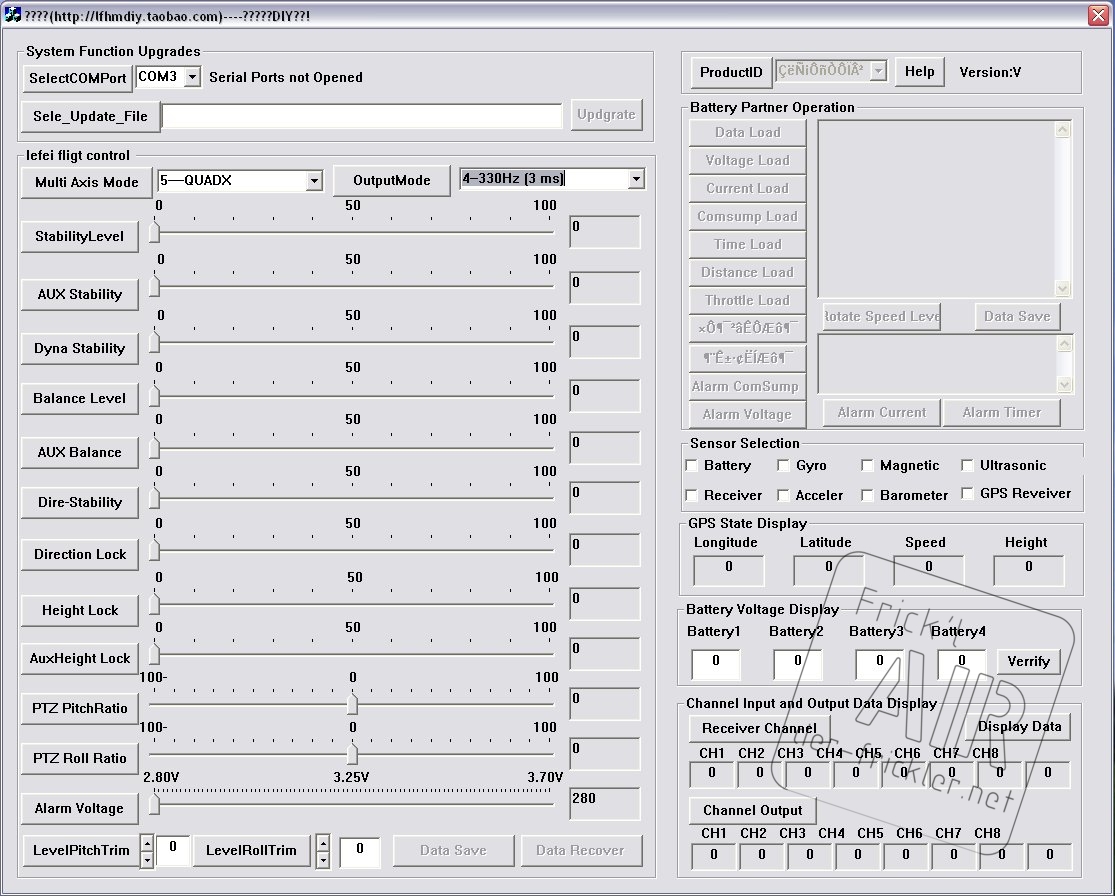
Obwohl es damals kaum Berichte und nur eine Chinesische Anleitung und Software gab wurde bestellt. Gestern kam das Ding an. Also ran damit an den Rechner, das funktionierte unter XP ohne Probleme. Da der Y4 noch nicht ganz fertig ist kam das Board noch schnell auf den test X4. In der Software nur auf Quattro-X umgestellt, Empfänger ran (4ch fürs fliegen, ch5-6 für Flugmodi-Schalter und ch7-8 fürs manuelle übersteuern der Camstabi), Regler angelernt laut Board Anleitung und los gehts.
Nach dem Selbsttest beim Anstecken zeigt er erst per LED an welche Sensoren vorhanden sind und funktionieren. Dann geht er in den Unarmed State in dem alle 8 LEDs „atmen“ sprich hell-dunkel faden. Nach dem Armen ist dann K.I.T.T. am Steuer - zumindest den LEDs nach ;_) Also Los, Gas rein und ENERGIE! Das Ding schwebt selenruhig im Zimmer über dem Bett, erster Test bestanden!
Bis dato bin ich sehr zufrieden mit dem Board, Konfiguration war ein Kinderspiel und schweben tut es schon mal ähnlich gut wie die OpenPilot CC. Wenns am Wochenende trocken ist das das Ding mal draußen zeigen was es kann.
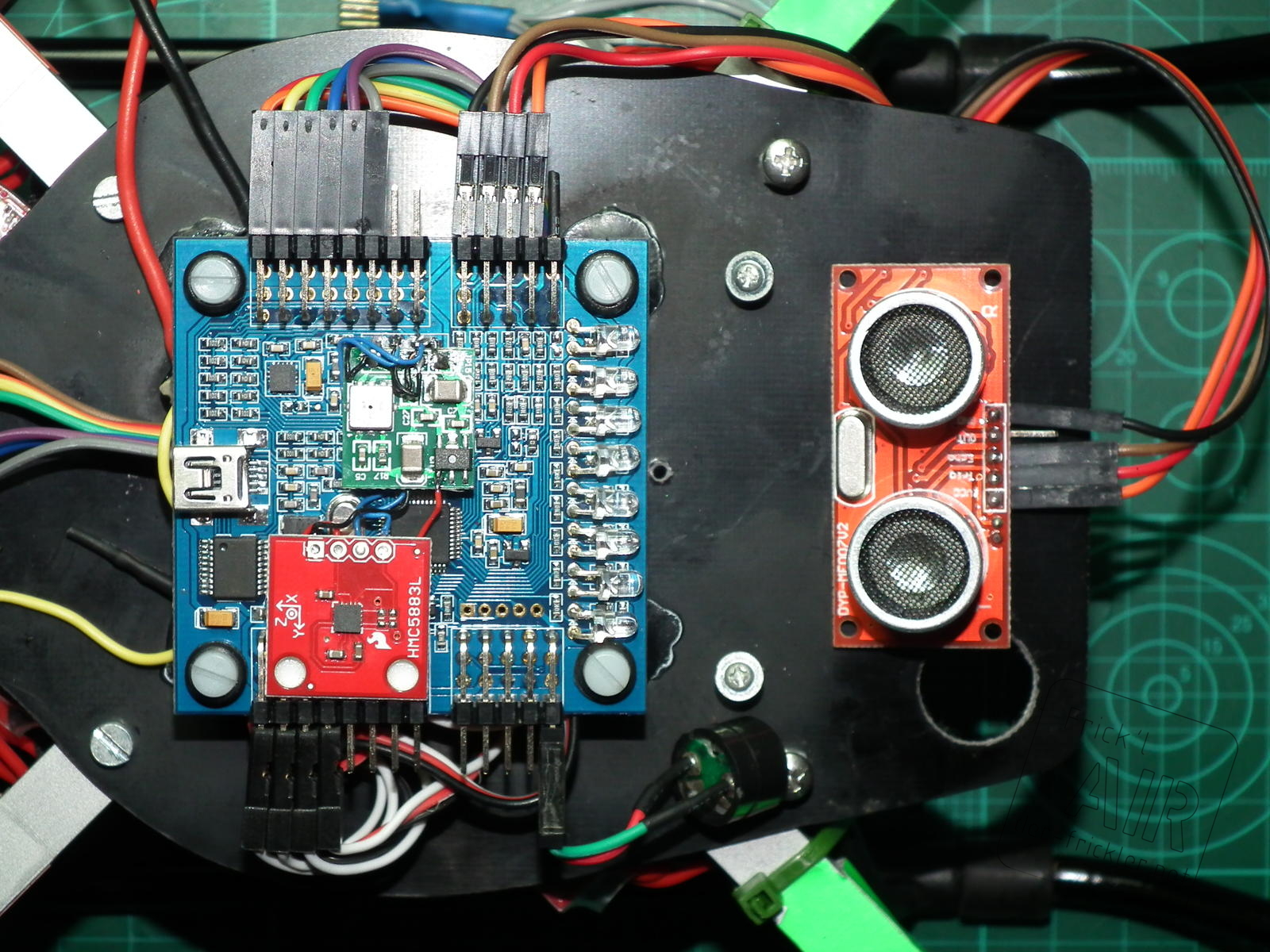
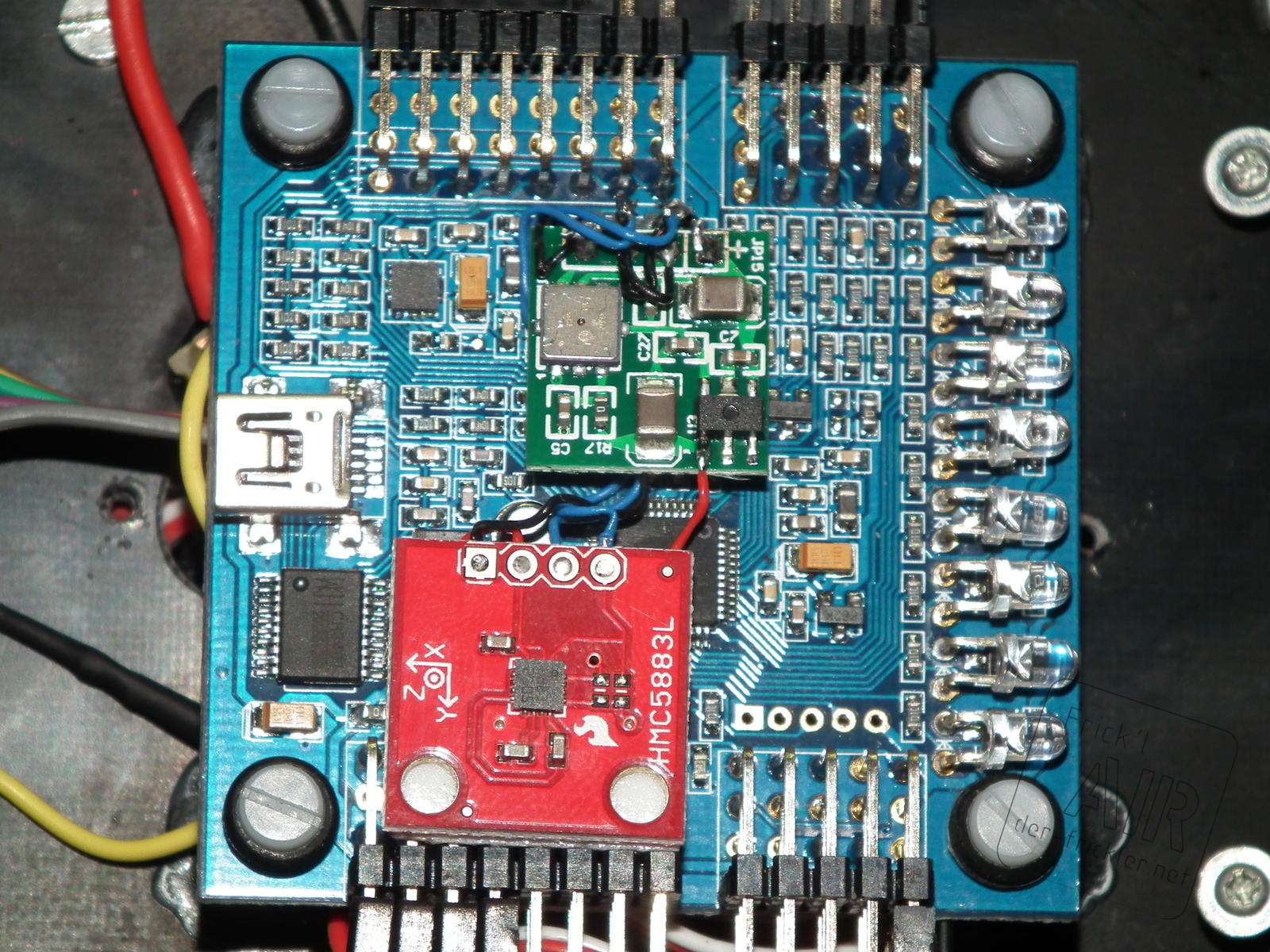
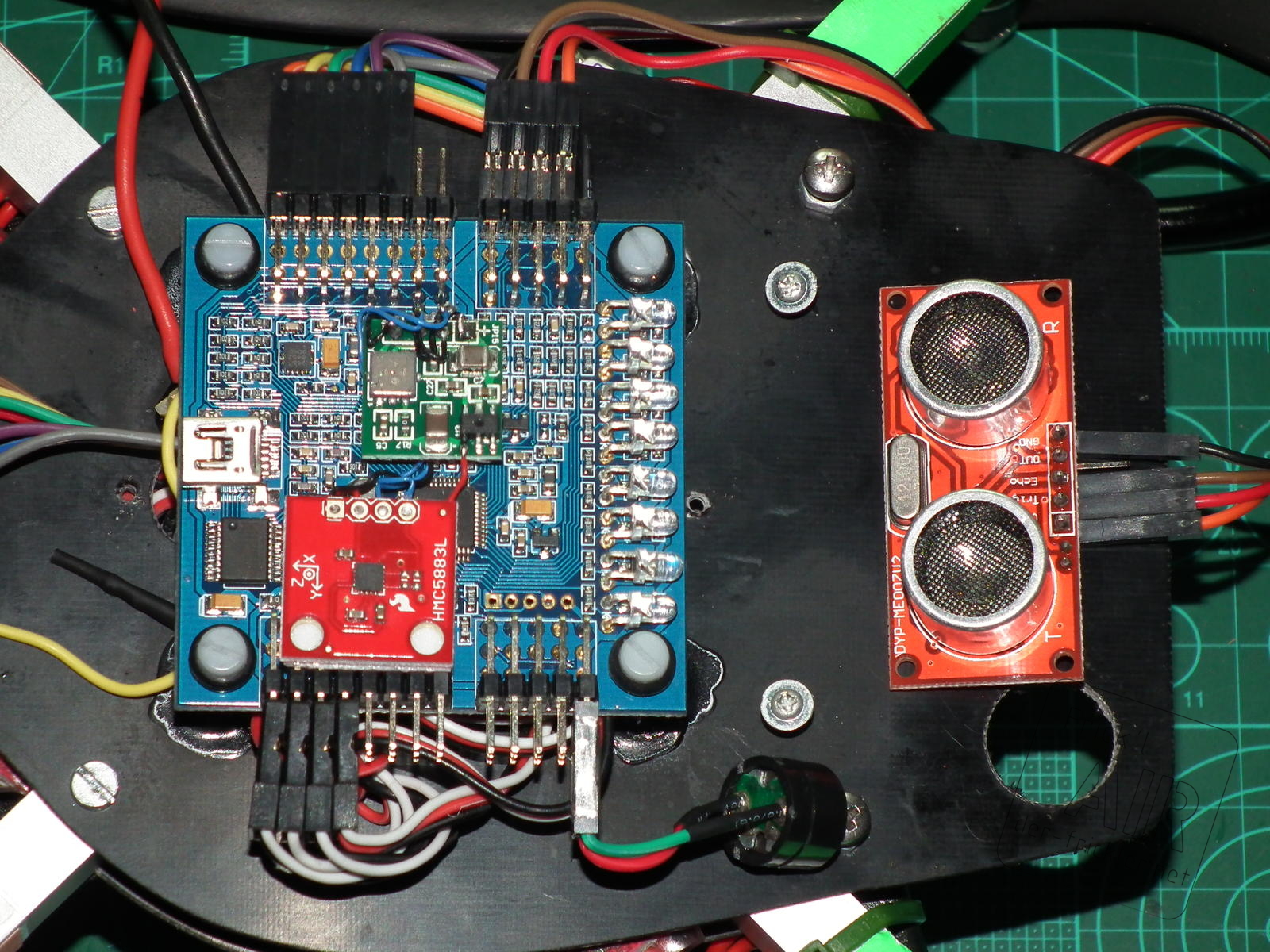
Der Kompass auf dem Carefree solle ein HMC5883 und der Baro ein BMP085 sein, beide hängen am I2C. Der Ultraschall Sensor ist ein HC-SR04 mit 2 eigenen Pins am Proz. Baro und Kompass aus dem Multiwii Zubehör passen, eine passendes Ultraschall Modul hab ich auch noch hier liegen. GPs kommt seriell ran, da werde ich auch mal mit meinen vorhandenen Modulen Spielen.
Bis dato kann die Firmware schon 3 Flugmodi per Schalter an: ACC-Schweben, Heading Hold und Heading Hold-3D. Wenn ich das richtig verstehe kann sie auf ch6 Höhe halten (bis 2m per Ultraschall, danach per Baro) und wohl Richtung/Position hold je nachdem ob nur Mag oder auch GPS verbaut sind.
Es bleibt also spannend, ich werde weiter berichten.
Gestern ging es spontan noch etwas weiter - eigentlich wollte ich gar nix mehr machen weil zu K.O.
Och, einfach mal den Ultraschallsensor der hier noch rumlag anstecken, der hat zwar einen Pin mehr, aber auf dem Board und am Sensor finden sich je 4 passende ;_). Noch schnell in der Software aktivieren und… Selbtcheck zeigt an US vorhanden und betriebsbereit. Mit der neuen Software geht der 5-polige Rote Ultraschall-Sensor leider nicht mehr, es wird in der GUI immer abwechselnd der MEsswert und 1500 bzw. 2000 angezeigt. Der Blaue HC-SR04 von ebay funktioniert hingegen!
Nun gut, mmmmh der FrSky Sensor Baro könnte von den Pins her genauf auf den 4-pinheader auf dem Board passen, VCC und GND Belegung passt schonmal. Aufgesteckt, angelötet, tut nix, ok, sind wohl SDA und SCL vertauscht, wieder ab, die beiden I2C Leitungen vertauscht und siehe da, Aktivieren und Selbtcheck zeigt an Barometer vorhanden und betriebsbereit.
Also weiter im Text, Kompass rausgesucht. Ich wollte ihn schon gerade anlöten als mir auffiel das der ja 3,3V braucht, also 3,3V VCC am Regler auf dem Baro-Board abgegriffen, GND, SAL und SCL an den Pinheader und wieder in der Software aktivieren, wie solls anders sein: Selbtcheck zeigt an Kompass vorhanden und betriebsbereit. Der muss jetzt nur noch nach Anleitung 1x initialisiert werden.
Soo, eben hat die Platine die ersten Außentests mit Bravur bestanden.
Schwebeflug ist prima ruhig, vergleichbar mit der OpenPilot CC. Der angelötete Kompass scheint zu funktionieren, ich habe NULL Drift auf YAW, sowas hatte ich bis dato bei keiner Platine. Mit aktiviertem Höhe-Halten lässt sich im cm Bereich über den Boden schweben, sobald man den Gasknüppel nicht mehr bewegt wird die Höhe gelockt. Über 2-3m scheint dann der Baro einzusteigen, hier funktioniert das Höhe halten auch, aber er pendelt schon so 2-3m würde ich sagen.
Mein bisheriges Fazit: Empfehlenswert! super einfach einzustellen (nur die Copter Art und das wars  ), schwebt sehr stabil, geht aber auch gut vorwärts, erweiterbar mit Baro, Kompass, Ultraschall und evtl GPS. Weniger als halber Preis der OpenPilot (und vor allem verfügbar)
), schwebt sehr stabil, geht aber auch gut vorwärts, erweiterbar mit Baro, Kompass, Ultraschall und evtl GPS. Weniger als halber Preis der OpenPilot (und vor allem verfügbar)
Denke jetzt wird der Y4 fertig gemacht damit ich auch mal das Camstabi testen kann.
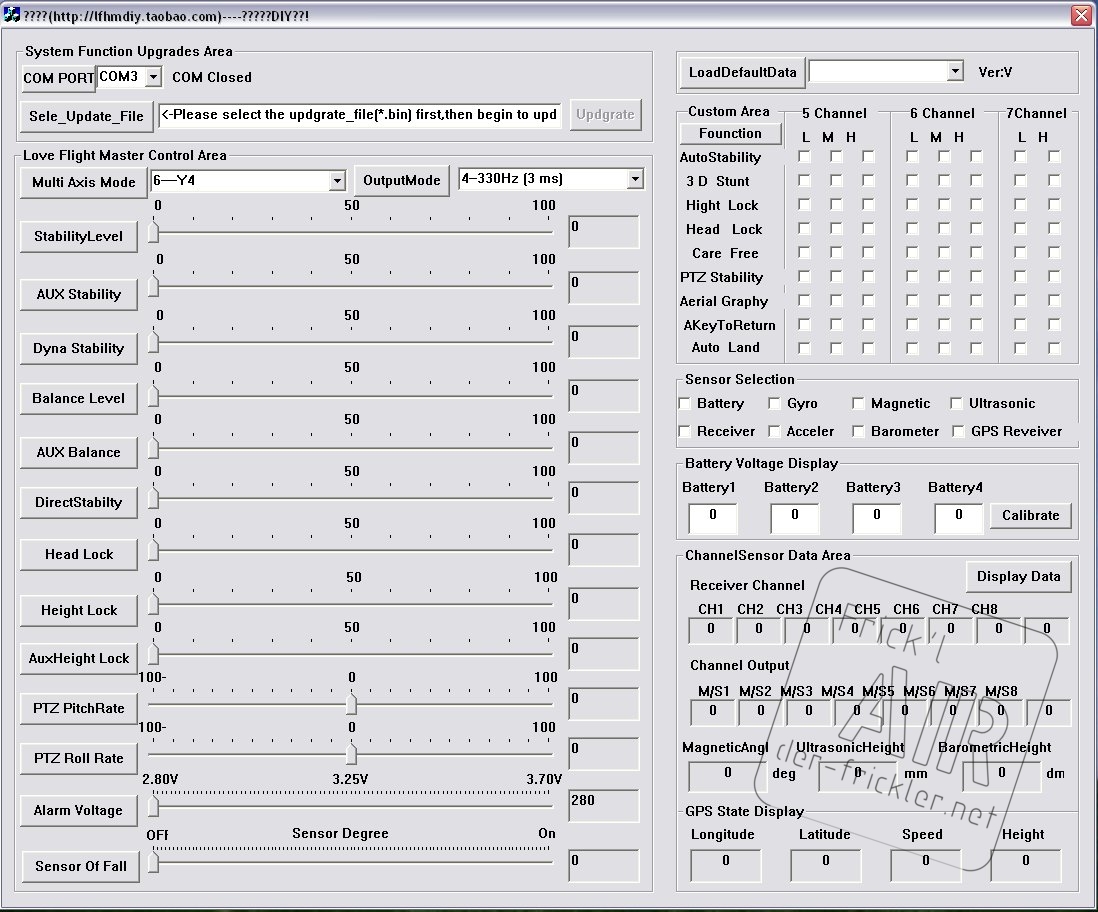
Seit gestern gibt es eine neue Firmware Version für das Rabbit Board im RCGroups. Neue Features sind das manuelle übersteuern der Camstabi sowie Auto-Land. Auch eine neue Version der Config Software ist dabei, jetzt lassen sich die ganzen Flugmodi viel einfacher den Kanälen/Schaltern zuordnen, auch hier scheint man sich (wie wohl bei der Firmware) beim Multiwii bedient zu haben. Update ging problemlos, allerdings werden die Settings alle resettet - was ich erst merkte als der Y4 so komisch flog, weil das Board auf Quad-X stand ;_) Das Übersteuern der automatischen Camstabi funktioniert gut per Poti an der Funke, alles andere muss ich erst draußen testen.
Hier noch der Link: http://www.rcgroups.com/forums/showpost.php?p=20547022&postcount=232
Bei Installationsproblemen mit der Software kann ich diesen Artikel empfehlen:
http://fpv-community.de/forum/showthread.php?tid=7543&pid=103944#pid103944
So, war gerade das erste mal mit dem Rabbit auf dem Y4 draußen, na ja…am Quattro flog es ja prima mit den defaults, aber am Y4 übersteuert es einfach total, hab ein wenig rumprobiert, ein paar runden unschön geflogen und dann beim Rundflug das Träge YAW falsch eingeschätzt und nen Baum erwischt. Board hat nix abbekommen, am Y4 sind 2 Ausleger und ein Prop hin, der wird jetzt zum Tri umgebaut. Zum ausprobieren der ganzen Flugmodi kam ich leider nicht mehr heute.


Links:
Links:
Ich garantiere bei meinen Bauberichten und Teilelisten keine Vollständigkeit etc...es wird aus den Teilen gebastelt die gerade herumliegen.
Bitte keine Anfragen zum Bau/Fräsen von Frames, Teilen oder sonstigen Aufträgen. Ich betreibe die Seite rein als Hobby und nutze die zur Verfügung stehende Zeit gerne für meine eigenen Projekte.
Bei einigen Projekten werde ich zu gegebener Zeit die Pläne veröffentlichen - aber auch hier lasse ich mich ungern hetzten ;-)
No waranties for completeness of any contructions, part lists etc.. I build from party i have just lying around in my workshop.
Please, No requests to buy frames, builds, etc.. I run this page in my spare-time and as hobby only. Want to keep my free time to work on my own projects - sorry
I will release the plans for some build at some point in time, but again, please don't ask for unreleased plans, i don't want to get rushed ;-)
Seiten-Werkzeuge
