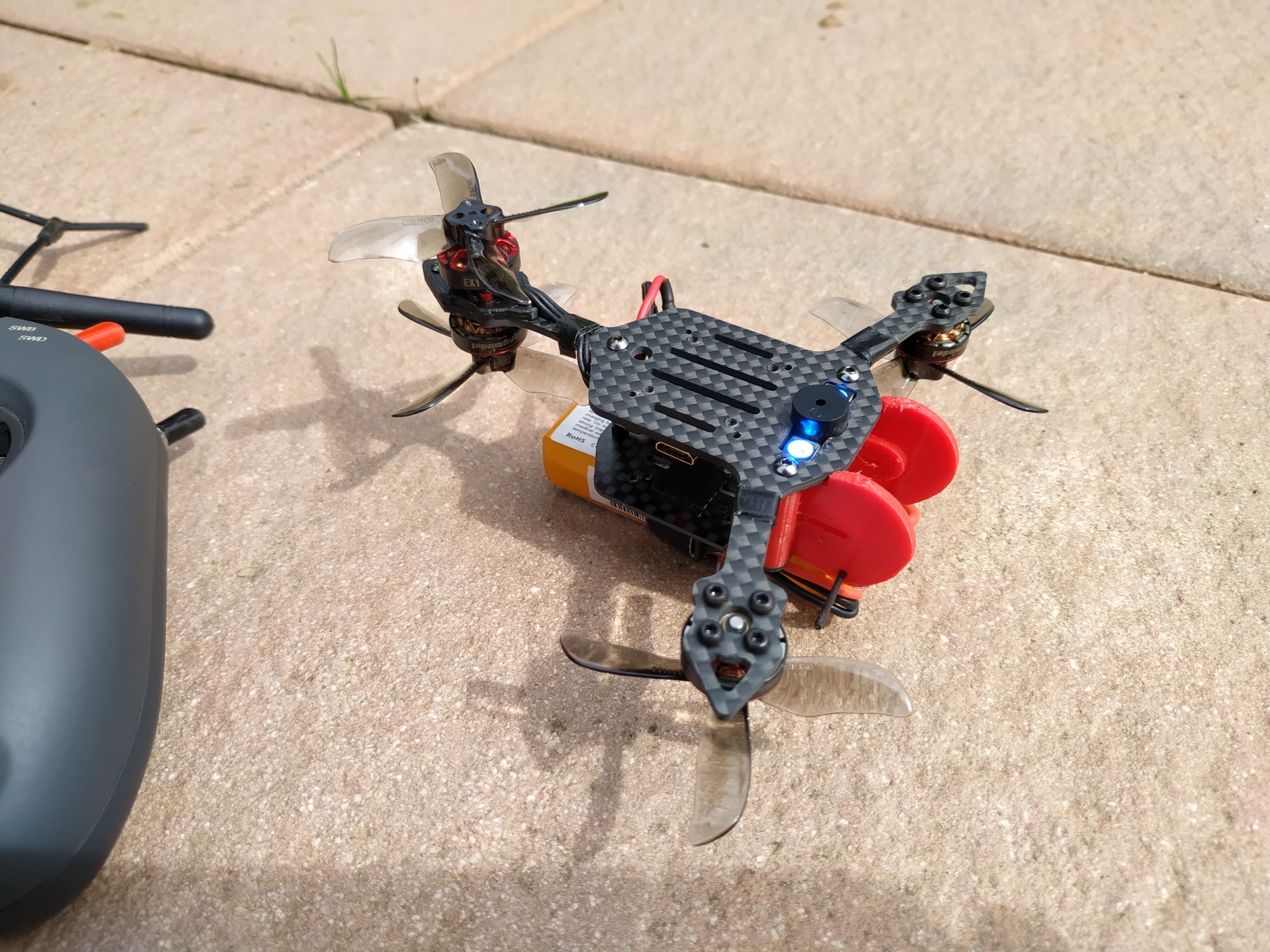
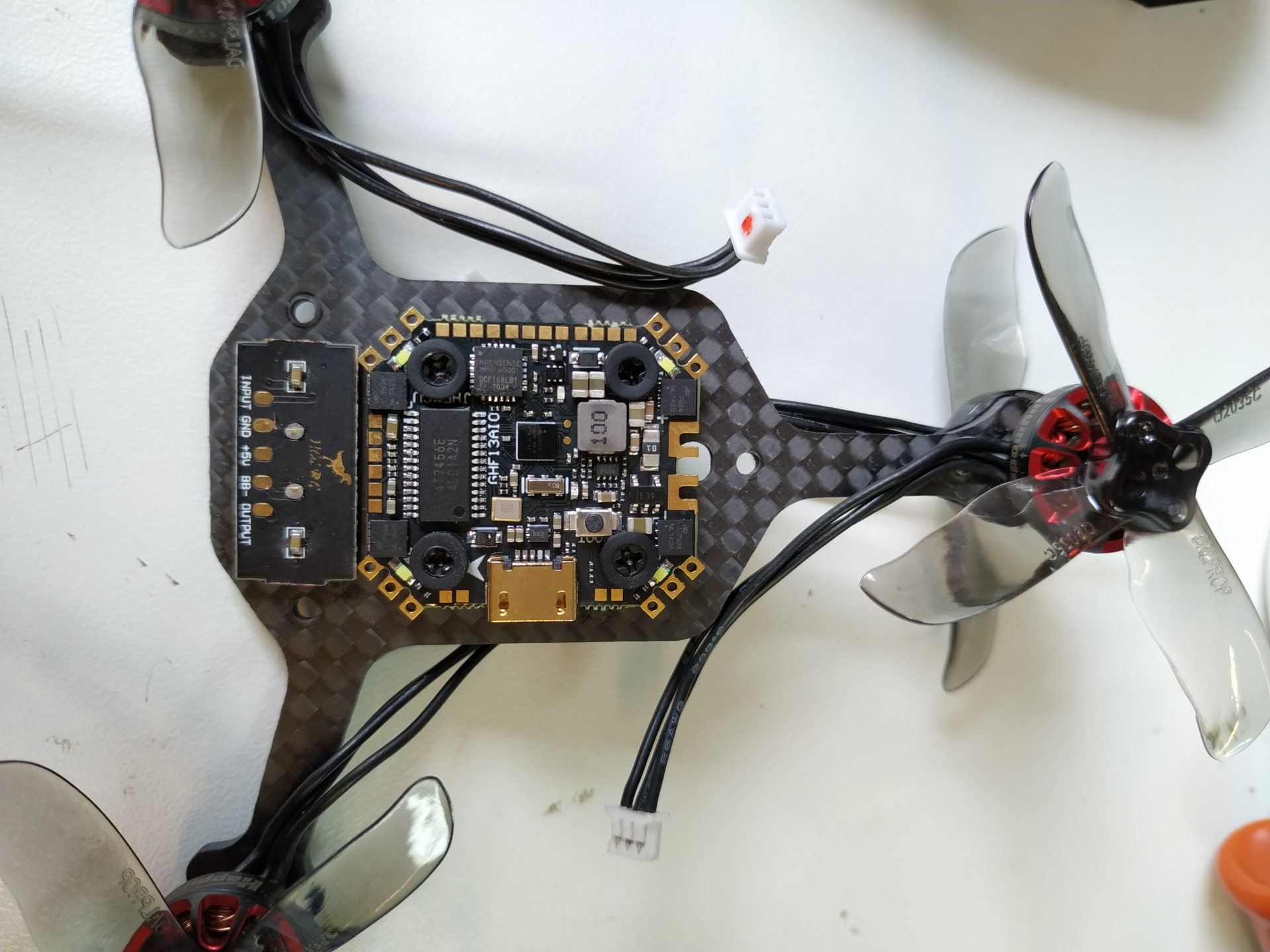
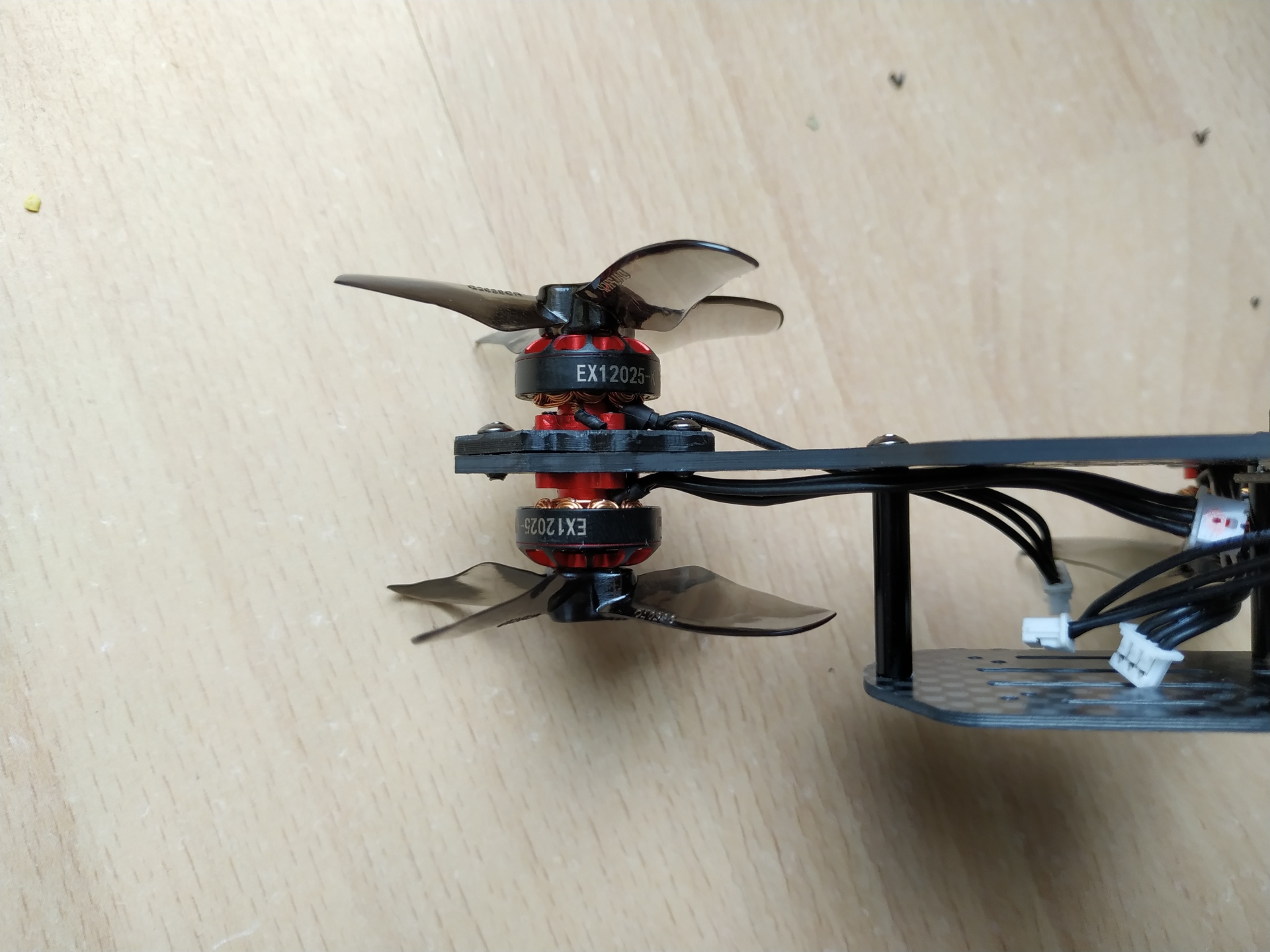
Y4 Nano
|
|
|
Pics:

















Videos:
Some proximity playing with the Y4 Nano Copter
testing the Insta 360 Go 1 on the Y4 Nano Copter
Links:
Settings:
Use Custom Betaflight for BF warnings on DJI OSD
diff all # version # Betaflight / STM32F411 (S411) 4.2.8 Mar 19 2021 / 21:01:25 (norevision) MSP API: 1.43 # config: manufacturer_id: MTKS, board_name: MATEKF411, version: 7b156dec, date: 2021-07-26T13:19:23Z # start the command batch batch start # reset configuration to default settings defaults nosave board_name MATEKF411 manufacturer_id MTKS mcu_id 0053002e3237511135393337 signature # resources resource MOTOR 1 B06 resource MOTOR 2 B07 resource MOTOR 3 B04 resource MOTOR 4 B05 # mixer mixer Y4 # feature feature LED_STRIP # serial serial 0 1 115200 57600 0 115200 serial 1 64 115200 57600 0 115200 # led led 0 7,0::CTW:1 led 1 8,0::CTW:1 # color color 0 216,0,255 color 1 294,0,255 # mode_color mode_color 7 0 5 # aux aux 0 0 0 1700 2100 0 0 aux 1 1 1 900 1300 0 0 aux 2 2 1 1300 1700 0 0 aux 3 13 3 1700 2100 0 0 # master set acc_calibration = -31,75,-80,1 set rssi_channel = 16 set serialrx_provider = CRSF set align_board_roll = 180 set small_angle = 180 set report_cell_voltage = ON set osd_warn_rssi = ON set osd_warn_dji = ON set osd_vbat_pos = 2419 set osd_rssi_pos = 2197 set osd_link_quality_pos = 121 set osd_rssi_dbm_pos = 89 set osd_tim_2_pos = 407 set osd_flymode_pos = 2183 set osd_vtx_channel_pos = 65 set osd_crosshairs_pos = 2287 set osd_current_pos = 2374 set osd_mah_drawn_pos = 2406 set osd_craft_name_pos = 2224 set osd_warnings_pos = 14794 set osd_avg_cell_voltage_pos = 2387 set osd_stat_max_spd = OFF set osd_stat_bbox = OFF set osd_stat_bb_no = OFF set gyro_1_align_yaw = 1800 profile 0 # profile 0 set p_pitch = 38 set i_pitch = 81 set d_pitch = 31 set f_pitch = 86 set p_roll = 35 set i_roll = 77 set d_roll = 29 set f_roll = 81 set p_yaw = 35 set i_yaw = 78 set f_yaw = 81 set d_min_roll = 21 set d_min_pitch = 23 profile 1 profile 2 # restore original profile selection profile 0 rateprofile 0 # rateprofile 0 set thr_expo = 30 set roll_srate = 80 set pitch_srate = 80 set throttle_limit_type = SCALE set throttle_limit_percent = 90 rateprofile 1 rateprofile 2 rateprofile 3 rateprofile 4 rateprofile 5 # restore original rateprofile selection rateprofile 0 # save configuration save #