
Benutzer-Werkzeuge
Seitenleiste
Inhaltsverzeichnis
Ducty
Ducty NG
|
|
|
Well, the last version of the old Ducty was quite OK, crash resistance was great, but it was lacking power…
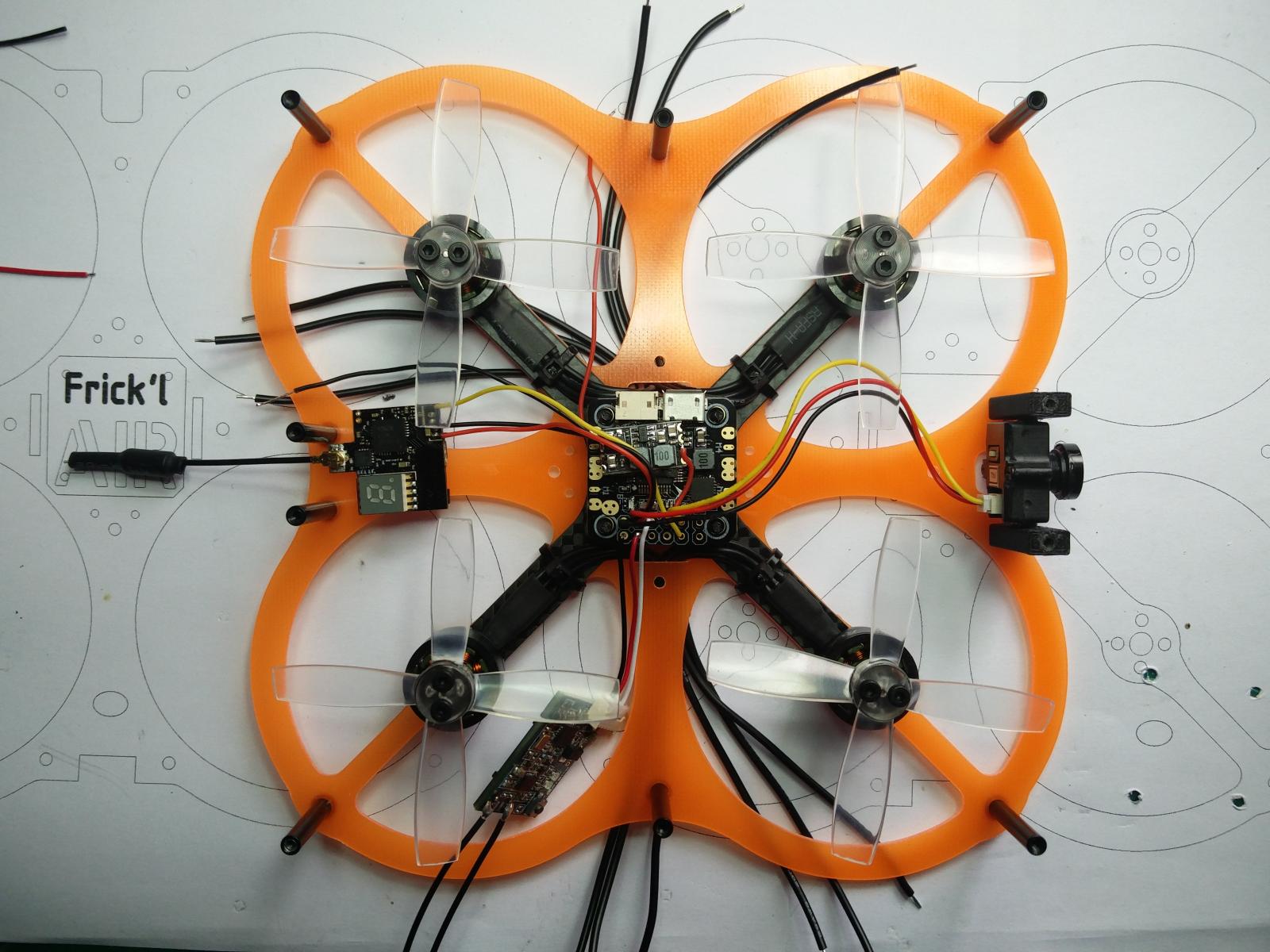
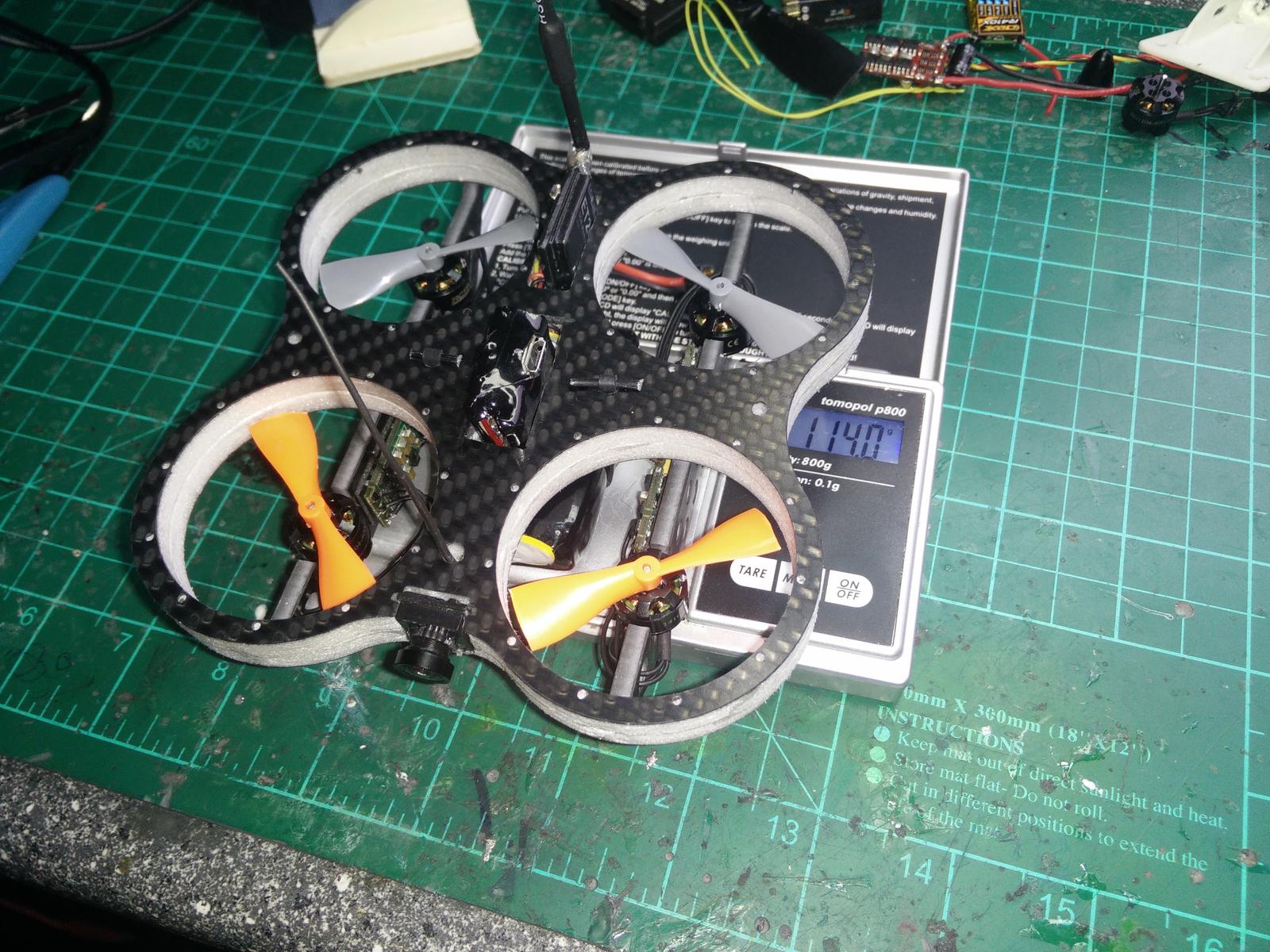
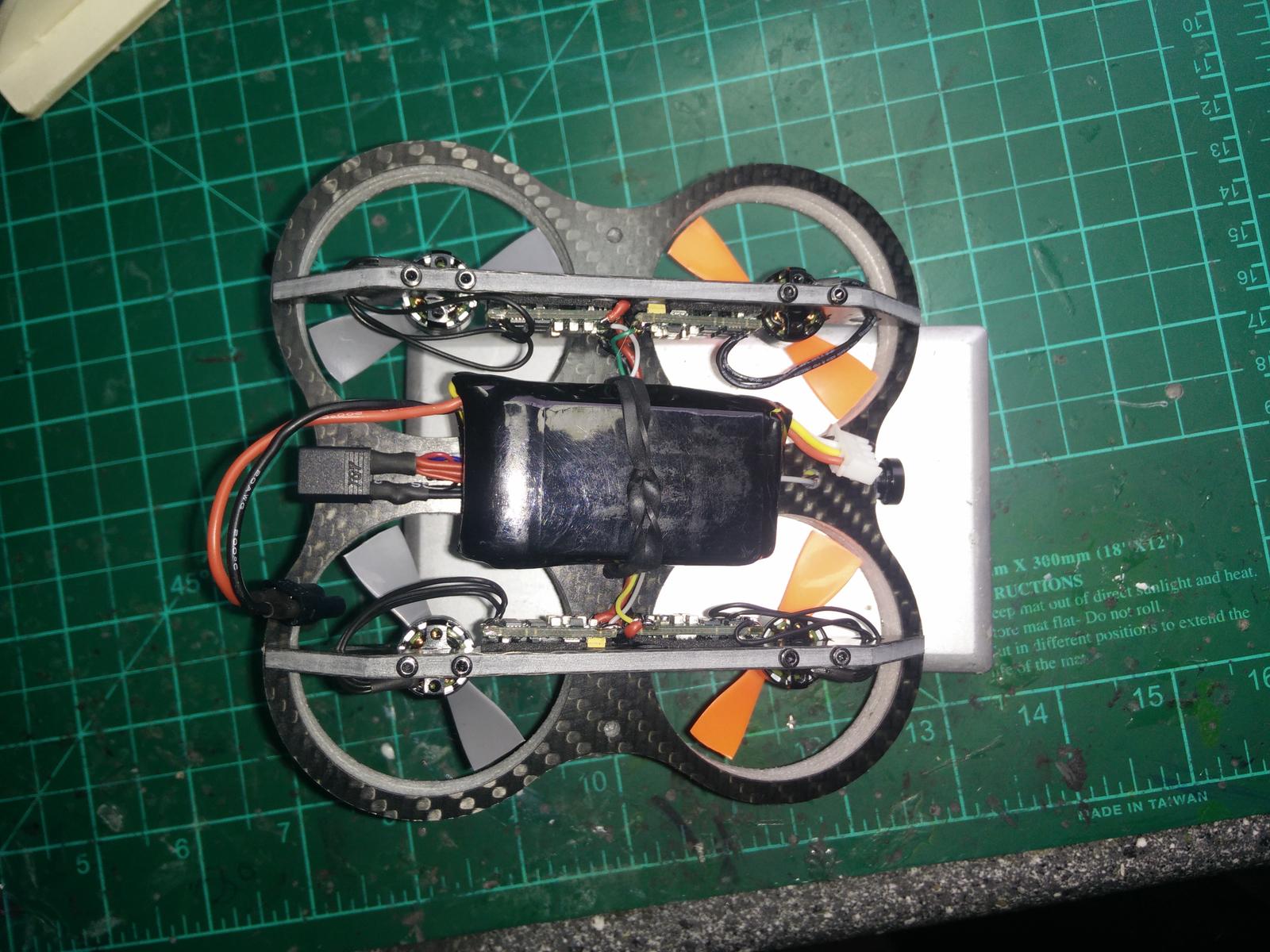
I ordered some 1304 motors as a replacement, but while waiting for them i figured out that the ESCs used in the old Ducty might be a part of the problem. The DYS Bl ESCs were just to slow to handle the 4000kv on 3S. Instead of replacing the ESCs as well, i decided to do a completely new build. This time with a 20x204in1 ESC and matching FC.
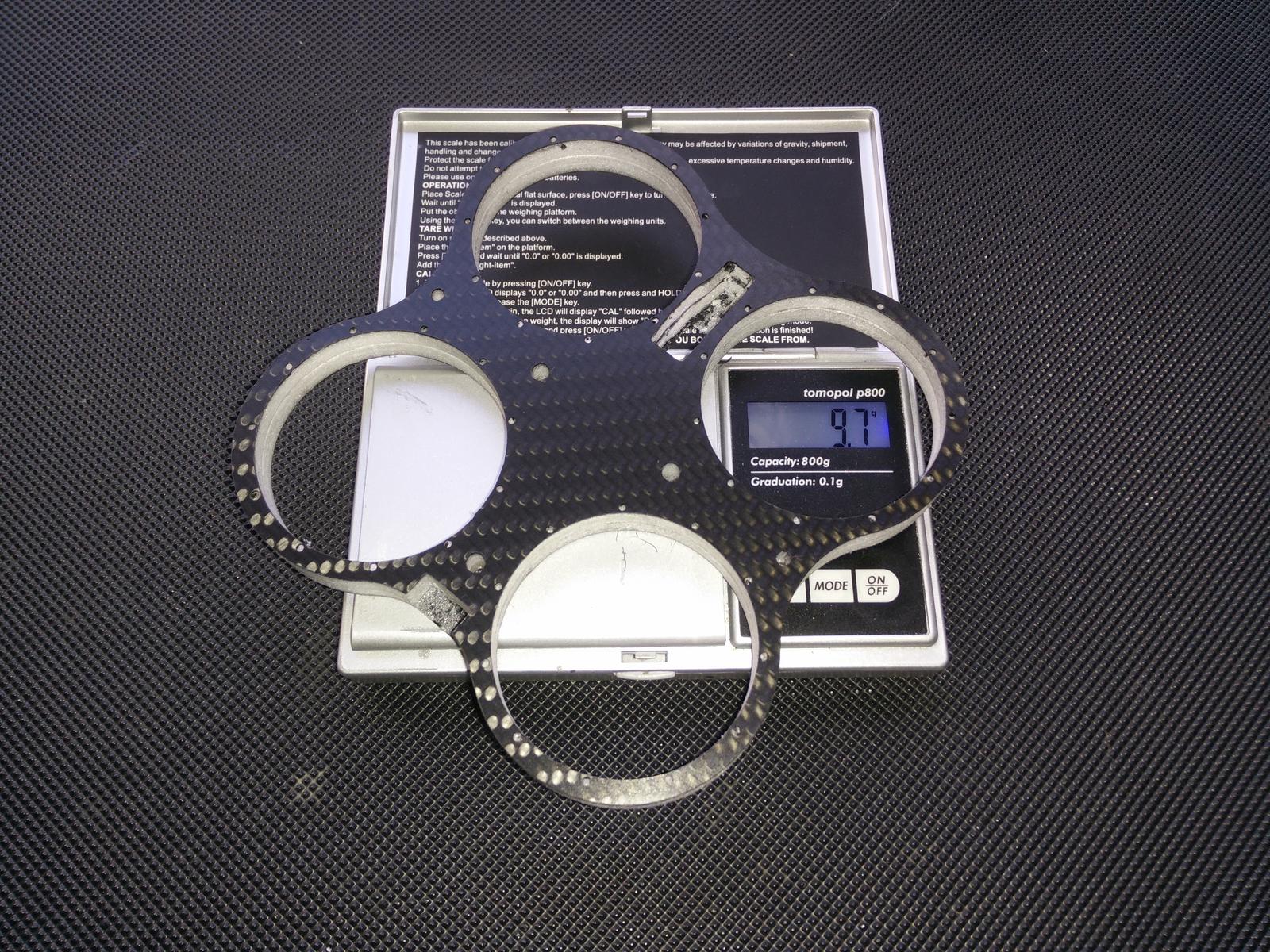
BTW. The Frame has ~ 140cm² of material, using the cheaper GFK instead of CFK adds ~10g of weight - acceptable for me.
Fotos:

Videos:
Links:
- FrSky XSR A2 Voltage Mod with 10k/51k divider
Settings:
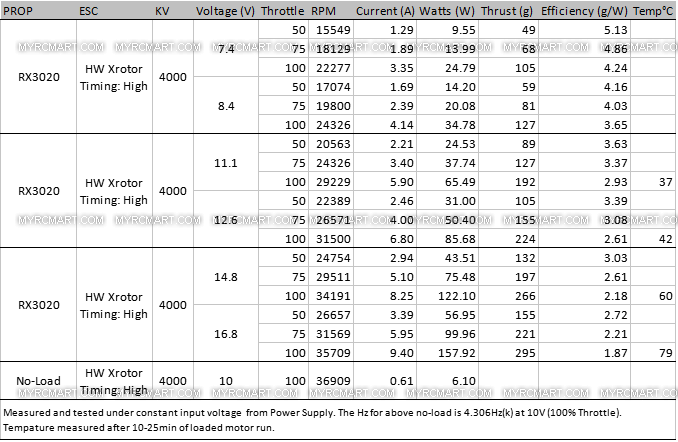
Motor Specs
Specification
Item name: H1304
KV: 4000KV
Weight (g): Approx 7.5g
Configuration: 9N12P
Shaft Diameter: 2mm
Out the Shaft is 1.5mm
Stator Diameter: 13mm
Stator Length: 4mm
Motor Dimensions: ΦXX×XXmm
No.of Cells(Lipo): 2-4S
Internal Resistance: –Ω @ 10V
No-Load Current: –A @ 10V
Cable Length: ~10cm (Soft AWG)
Screw:
M2*3 (Base)
M2*6 (Top)
Ducty v1-3
|
|
|
Der kleine Blade Inductrix mit FPV macht indoor extrem Spass, ist aber mit Cam und Sender leicht überfordert. Der neue Induxtrix 200 ist zu groß, zu teuer und vor allem nicht selbstgebaut. → Also selbst was zeichnen….
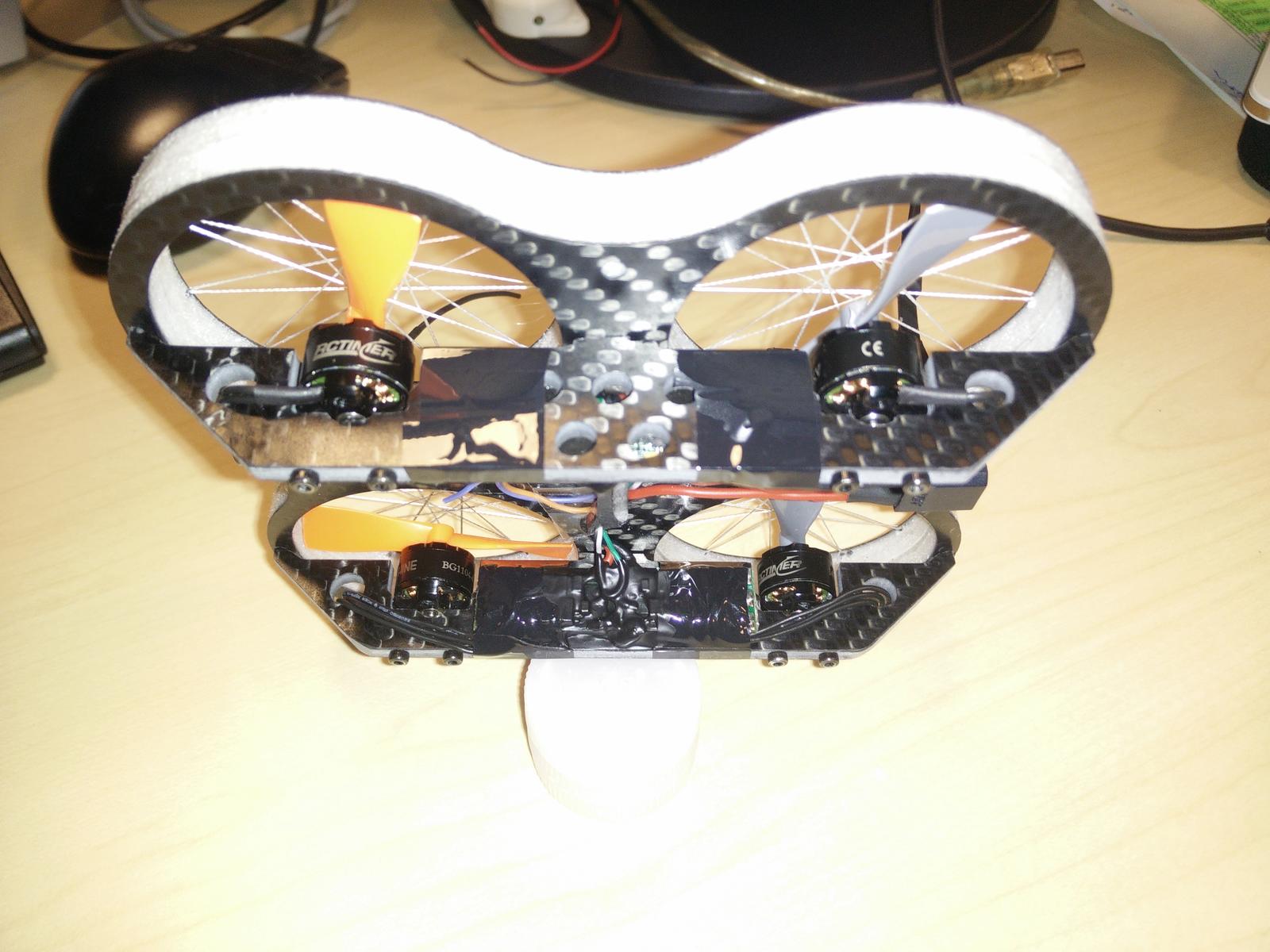
Nach 3 Iterationen mit 2 Zoll CFK Schaum, 3 Zoll CFK Schaum, 3 Zoll Styrodur bin ich nun bei einem 2.5 Zoll Frame aus 2x 1mm GFK mit 2x20mm Standoffs gelandet. Das scheint recht stabil und gut zu funktionieren.
So, der Ducty hat auch seine neuen 2535 4-Blatt Props bekommen. Bei ner ganzen Tüte mit Teilen - jeder Prop besteht aus 2 verschiedenen Spritzgußteilen - war erstmal puzzeln angesagt  Fliegt aber klasse damit, laut Anderen wohl gleich viel Schub die wie 3020, also deutlich mehr als meine gekürzten 2530.
Sound ist auch viel Besser, leiser und nicht mehr so beißend. Allerdings werden die kleinen 1104er Motoren recht warm, denke da wegen der Überkopf Montage die direkte Kühlung fehlt. 1105 oder 1106 Motoren währen wohl besser geeignet….
Fliegt aber klasse damit, laut Anderen wohl gleich viel Schub die wie 3020, also deutlich mehr als meine gekürzten 2530.
Sound ist auch viel Besser, leiser und nicht mehr so beißend. Allerdings werden die kleinen 1104er Motoren recht warm, denke da wegen der Überkopf Montage die direkte Kühlung fehlt. 1105 oder 1106 Motoren währen wohl besser geeignet….
ACHTUNG: Cleanflight hat/hatte einen Bug bei Nutzung von PPM auf dem CC3D. In Betaflight ist der schon länger gefixt, dafür ist PPM-IN von Pin3 auf Pin8 des Steckers gewandert.
Fotos:












Videos:
Erster Test der letzten Version aus GFK.
Links:
Settings:
CleanFlight 1.13.0 RC1
CF Configurator 1.2.2
# set Current settings: looptime = 2000 emf_avoidance = OFF i2c_highspeed = ON gyro_sync = ON gyro_sync_denom = 1 mid_rc = 1500 min_check = 1100 max_check = 1900 rssi_channel = 0 rssi_scale = 30 rssi_ppm_invert = OFF rc_smoothing = OFF rx_min_usec = 885 rx_max_usec = 2115 serialrx_provider = SPEK1024 sbus_inversion = ON spektrum_sat_bind = 0 input_filtering_mode = OFF min_throttle = 1070 max_throttle = 1850 min_command = 1000 servo_center_pulse = 1500 motor_pwm_rate = 400 servo_pwm_rate = 50 3d_deadband_low = 1406 3d_deadband_high = 1514 3d_neutral = 1460 retarded_arm = OFF disarm_kill_switch = ON auto_disarm_delay = 5 max_arm_angle = 25 small_angle = 25 fixedwing_althold_dir = 1 reboot_character = 82 gps_provider = NMEA gps_sbas_mode = AUTO gps_auto_config = ON gps_auto_baud = OFF gps_pos_p = 15 gps_pos_i = 0 gps_pos_d = 0 gps_posr_p = 34 gps_posr_i = 14 gps_posr_d = 53 gps_nav_p = 25 gps_nav_i = 33 gps_nav_d = 83 gps_wp_radius = 200 nav_controls_heading = ON nav_speed_min = 100 nav_speed_max = 300 nav_slew_rate = 30 telemetry_switch = OFF telemetry_inversion = OFF frsky_default_lattitude = 0.000 frsky_default_longitude = 0.000 frsky_coordinates_format = 0 frsky_unit = IMPERIAL frsky_vfas_precision = 0 hott_alarm_sound_interval = 5 battery_capacity = 0 vbat_scale = 110 vbat_max_cell_voltage = 43 vbat_min_cell_voltage = 33 vbat_warning_cell_voltage = 35 current_meter_scale = 400 current_meter_offset = 0 multiwii_current_meter_output = OFF current_meter_type = ADC align_gyro = DEFAULT align_acc = DEFAULT align_mag = DEFAULT align_board_roll = 0 align_board_pitch = 0 align_board_yaw = 0 max_angle_inclination = 500 gyro_lpf = 188HZ gyro_soft_lpf = 60 moron_threshold = 32 imu_dcm_kp = 2500 imu_dcm_ki = 0 alt_hold_deadband = 40 alt_hold_fast_change = ON deadband = 0 yaw_deadband = 0 yaw_control_direction = 1 3d_deadband_throttle = 50 throttle_correction_value = 0 throttle_correction_angle = 800 pid_at_min_throttle = ON yaw_motor_direction = 1 yaw_jump_prevention_limit = 200 tri_unarmed_servo = ON servo_lowpass_freq = 400.000 servo_lowpass_enable = OFF default_rate_profile = 0 rc_rate = 90 rc_expo = 65 rc_yaw_expo = 0 thr_mid = 50 thr_expo = 0 roll_rate = 40 pitch_rate = 40 yaw_rate = 40 tpa_rate = 0 tpa_breakpoint = 1500 failsafe_delay = 10 failsafe_off_delay = 200 failsafe_throttle = 1000 failsafe_kill_switch = OFF failsafe_throttle_low_delay = 100 failsafe_procedure = 1 gimbal_mode = NORMAL acc_hardware = 0 acc_cut_hz = 15 accxy_deadband = 40 accz_deadband = 40 accz_lpf_cutoff = 5.000 acc_unarmedcal = ON acc_trim_pitch = 0 acc_trim_roll = 0 baro_tab_size = 21 baro_noise_lpf = 0.600 baro_cf_vel = 0.985 baro_cf_alt = 0.965 baro_hardware = 0 mag_hardware = 0 mag_declination = 0 pid_controller = MWREWRITE p_pitch = 40 i_pitch = 30 d_pitch = 18 p_roll = 40 i_roll = 30 d_roll = 18 p_yaw = 85 i_yaw = 45 d_yaw = 0 p_alt = 50 i_alt = 0 d_alt = 0 p_level = 20 i_level = 10 d_level = 100 p_vel = 120 i_vel = 45 d_vel = 1 yaw_p_limit = 500 dterm_cut_hz = 0 blackbox_rate_num = 1 blackbox_rate_denom = 1 blackbox_device = SPIFLASH magzero_x = 0 magzero_y = 0 magzero_z = 0
Ich garantiere bei meinen Bauberichten und Teilelisten keine Vollständigkeit etc...es wird aus den Teilen gebastelt die gerade herumliegen.
Bitte keine Anfragen zum Bau/Fräsen von Frames, Teilen oder sonstigen Aufträgen. Ich betreibe die Seite rein als Hobby und nutze die zur Verfügung stehende Zeit gerne für meine eigenen Projekte.
Bei einigen Projekten werde ich zu gegebener Zeit die Pläne veröffentlichen - aber auch hier lasse ich mich ungern hetzten ;-)
No waranties for completeness of any contructions, part lists etc.. I build from party i have just lying around in my workshop.
Please, No requests to buy frames, builds, etc.. I run this page in my spare-time and as hobby only. Want to keep my free time to work on my own projects - sorry
I will release the plans for some build at some point in time, but again, please don't ask for unreleased plans, i don't want to get rushed ;-)
Seiten-Werkzeuge
