5" 250g
|
|
|
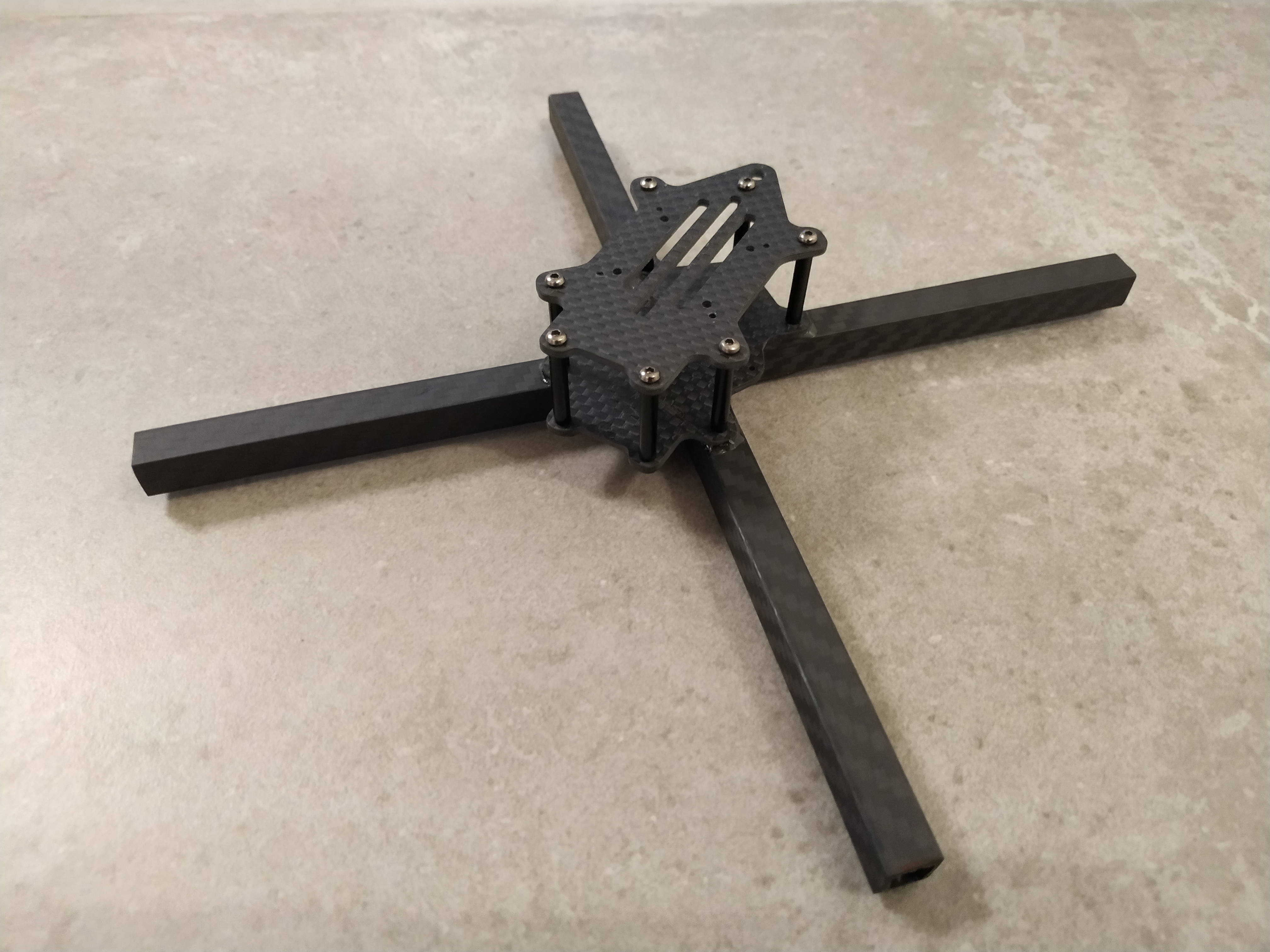
After i saw some 5„ sub 250 build, i wanted to own something like that as well - but it must be durable! Decided to go with the good old RCExplorer 10×10 square-carbon tubes that have proven to be nearly indestructible and small 1.5mm centerplates.
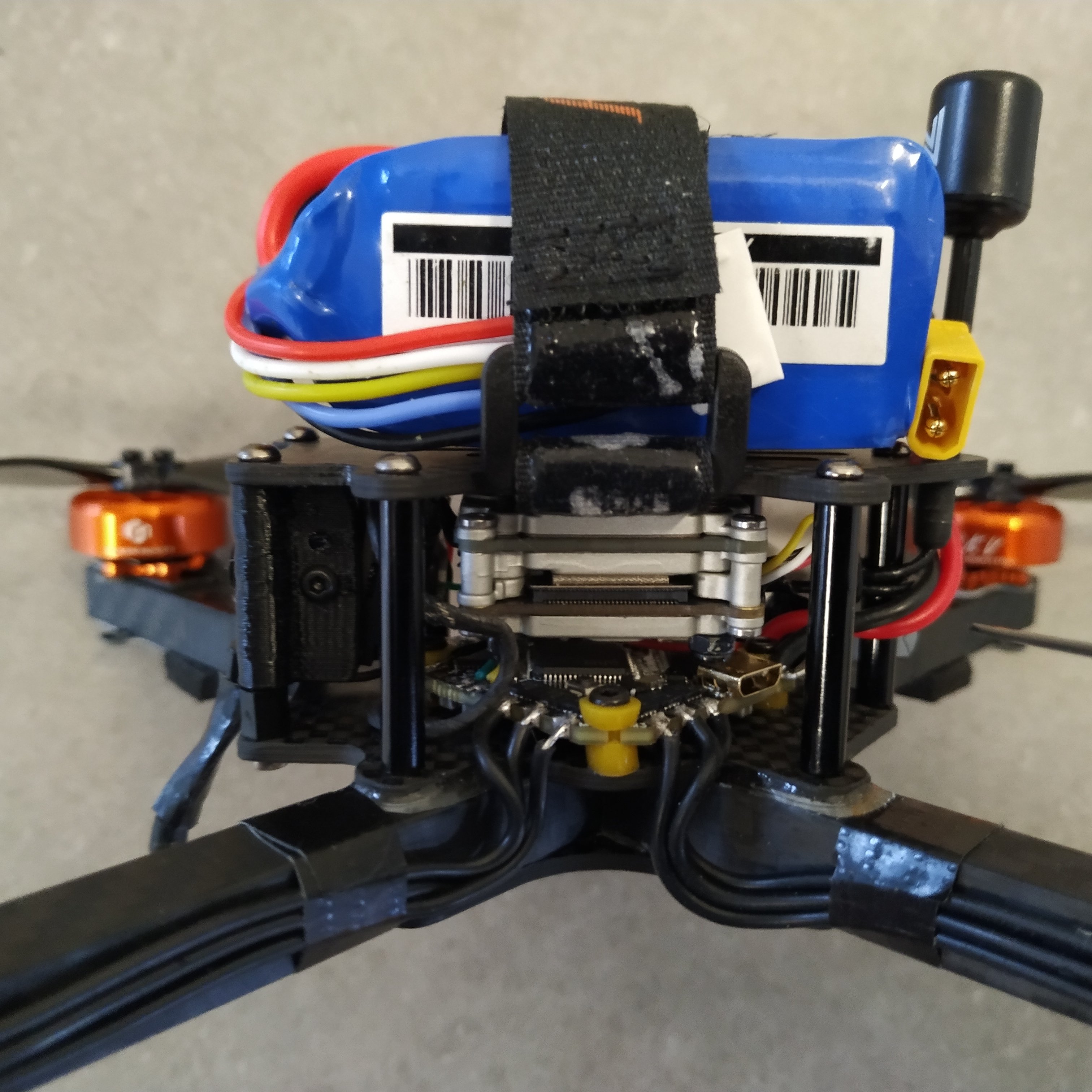
As its winter in Germany, i took it to the indoor flying. Hovers at ~10% of throttle and the fist very short throttle push fired it into the ceiling. Power is overwhelming, crash test succeeded 
So far i was only able to fly it indoors, most on 2-3S. It flies so stable and is so quite on 2S, can't wait to test the 4S beast outside.
Pics:
5"











3"




Settings:
Use Custom Betaflight for BF warnings on DJI OSD
# # diff all # version # Betaflight / STM32F405 (S405) 4.2.8 Mar 19 2021 / 21:00:59 (norevision) MSP API: 1.43 # config: manufacturer_id: JHEF, board_name: JHEF405, version: dfa09d94, date: 2021-03-06T10:55:26Z # start the command batch batch start # reset configuration to default settings defaults nosave board_name JHEF405 manufacturer_id JHEF mcu_id 003c00423548500720313753 signature # name: LOW BATTERY # feature feature -RX_PARALLEL_PWM feature TELEMETRY # beacon beacon RX_LOST beacon RX_SET # serial serial 2 1 115200 57600 0 115200 serial 5 64 115200 57600 0 115200 # aux aux 0 0 0 1700 2100 0 0 aux 1 1 1 900 1300 0 0 aux 2 2 1 1300 1700 0 0 aux 3 13 3 1700 2100 0 0 aux 4 35 2 1700 2100 0 0 # master set acc_calibration = 6,-26,38,1 set rssi_channel = 15 set serialrx_provider = CRSF set motor_pwm_protocol = DSHOT600 set align_board_yaw = 90 set vbat_scale = 114 set ibata_scale = 108 set report_cell_voltage = ON set osd_warn_rssi = ON set osd_warn_dji = ON set osd_vbat_pos = 2419 set osd_rssi_pos = 2197 set osd_link_quality_pos = 121 set osd_rssi_dbm_pos = 89 set osd_tim_2_pos = 407 set osd_flymode_pos = 2183 set osd_vtx_channel_pos = 65 set osd_crosshairs_pos = 2287 set osd_current_pos = 2374 set osd_mah_drawn_pos = 2406 set osd_craft_name_pos = 2224 set osd_warnings_pos = 14794 set osd_avg_cell_voltage_pos = 2387 set osd_stat_max_spd = OFF set osd_stat_bbox = OFF set osd_stat_bb_no = OFF set gyro_1_align_yaw = 900 set name = LOW BATTERY profile 0 profile 1 profile 2 # restore original profile selection profile 0 rateprofile 0 rateprofile 1 rateprofile 2 rateprofile 3 rateprofile 4 rateprofile 5 # restore original rateprofile selection rateprofile 0 # save configuration save #