Inhaltsverzeichnis
LiNav - high-tech on low-tech
|
|
|
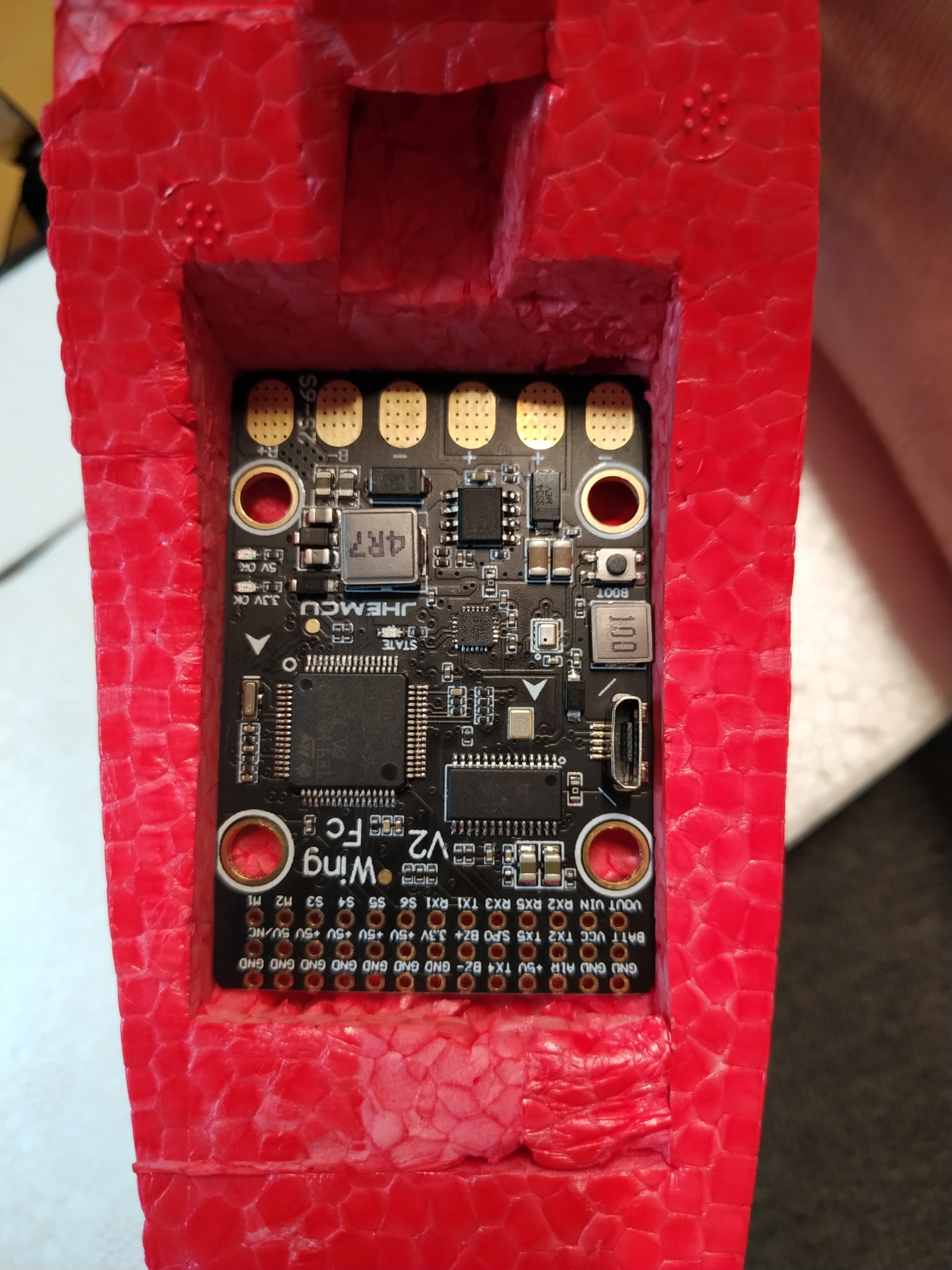
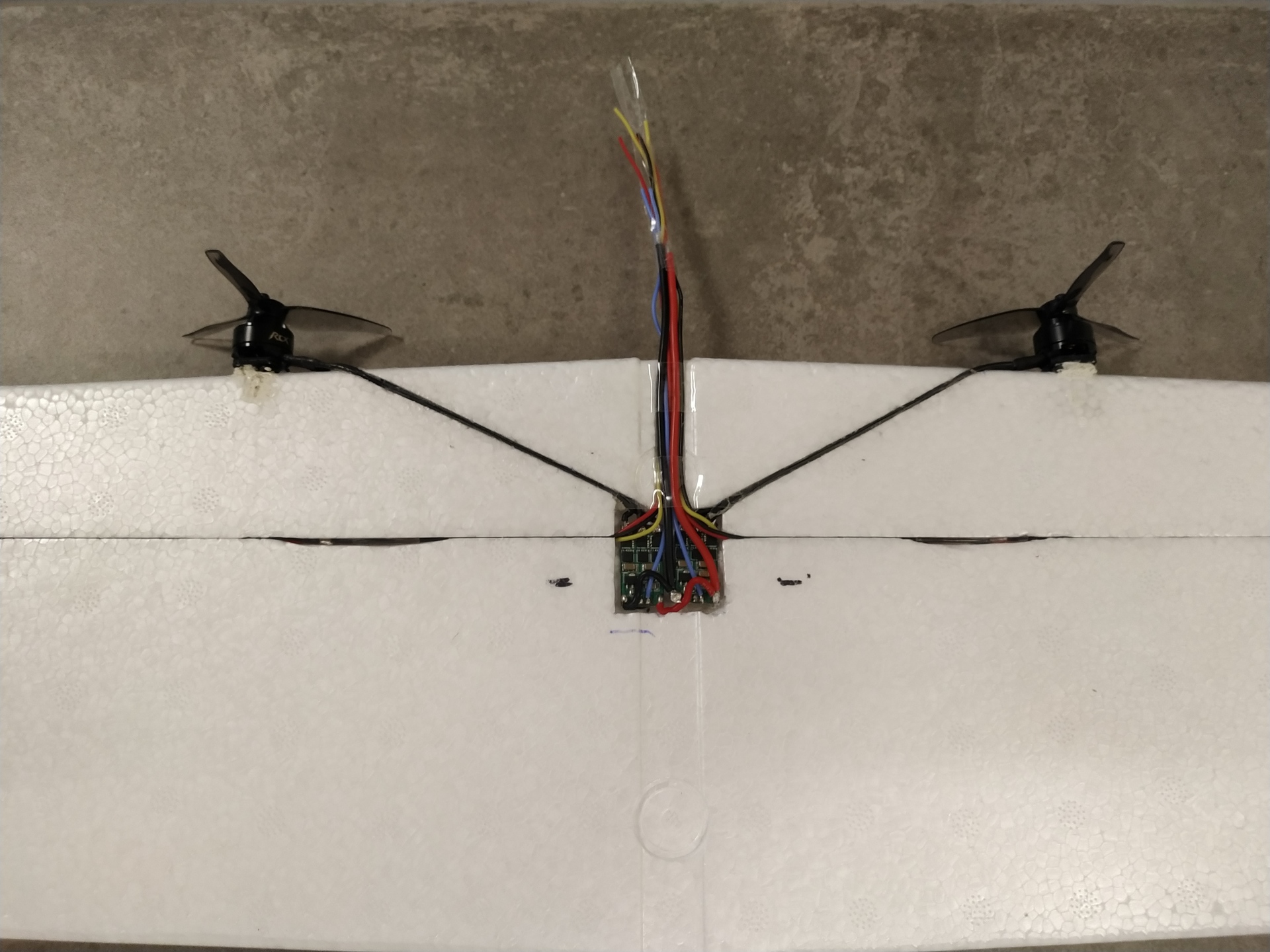
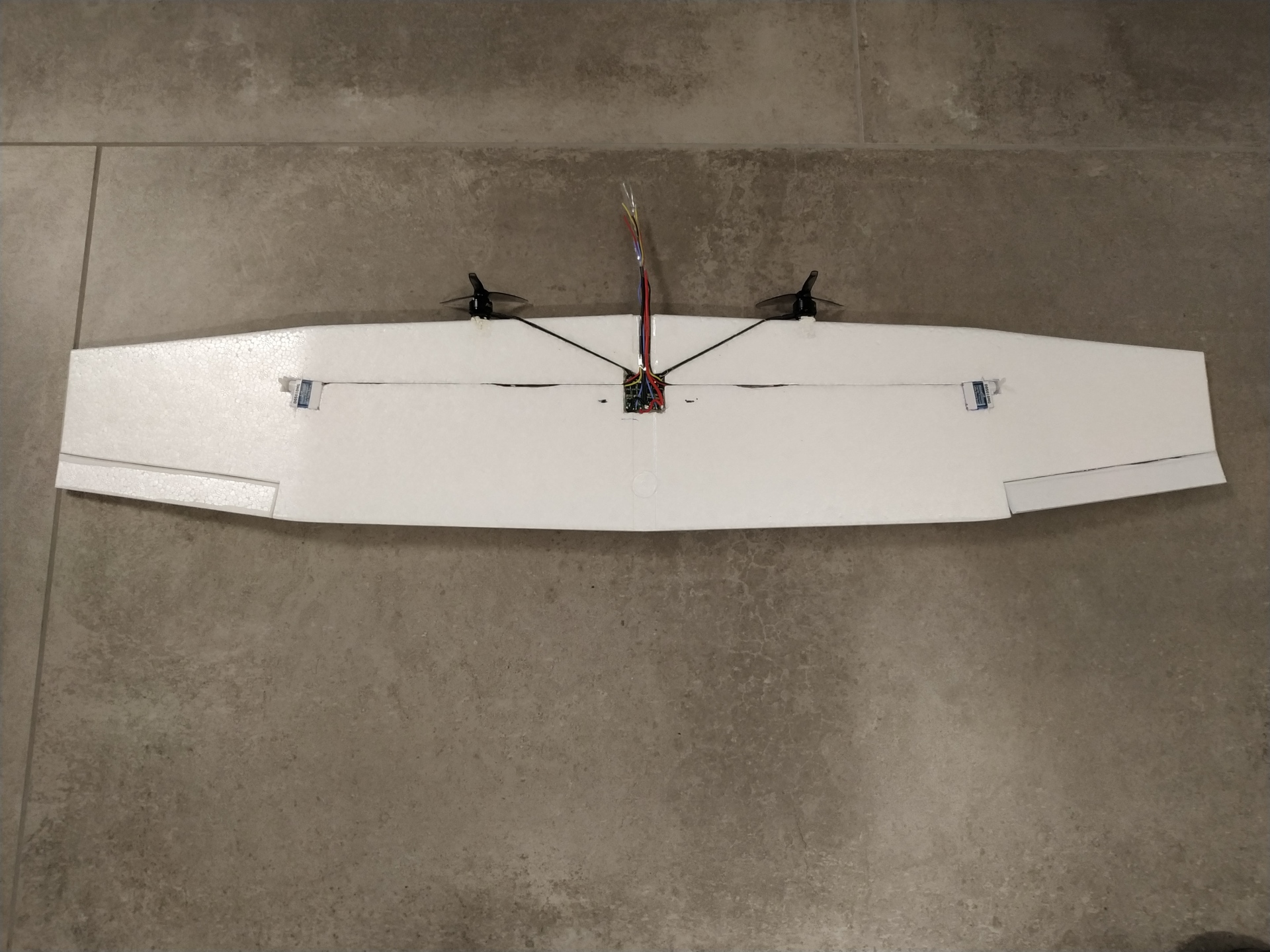
I wanted to have a small „classical“ plane to try out the DJI Digital FPV System. as i still had one of the LIDL gliders laying around, i chose to use that as a base. 2 small spare quad motors go on the wings to keep the cam prop-free. As i wanted to use ExpressLRS, there was the need of a flight controller. why not use iNav with GPS to make it more stable and have a nice OSD.
Instead of integrating the DJI system, i just put the canopy from my small 3" quad on top. As its only pushed on with one connector, i can easily change the cam/vtx between the quad and the plane. Byttery goes right below the CG in the bottom of the frame, that way i can test different batteries without dealing with changed CG.
Pics:











Videos:
Links:
Settings:
set report_cell_voltage = ON save