
Benutzer-Werkzeuge
Seitenleiste
3inch 1404
|
|
|
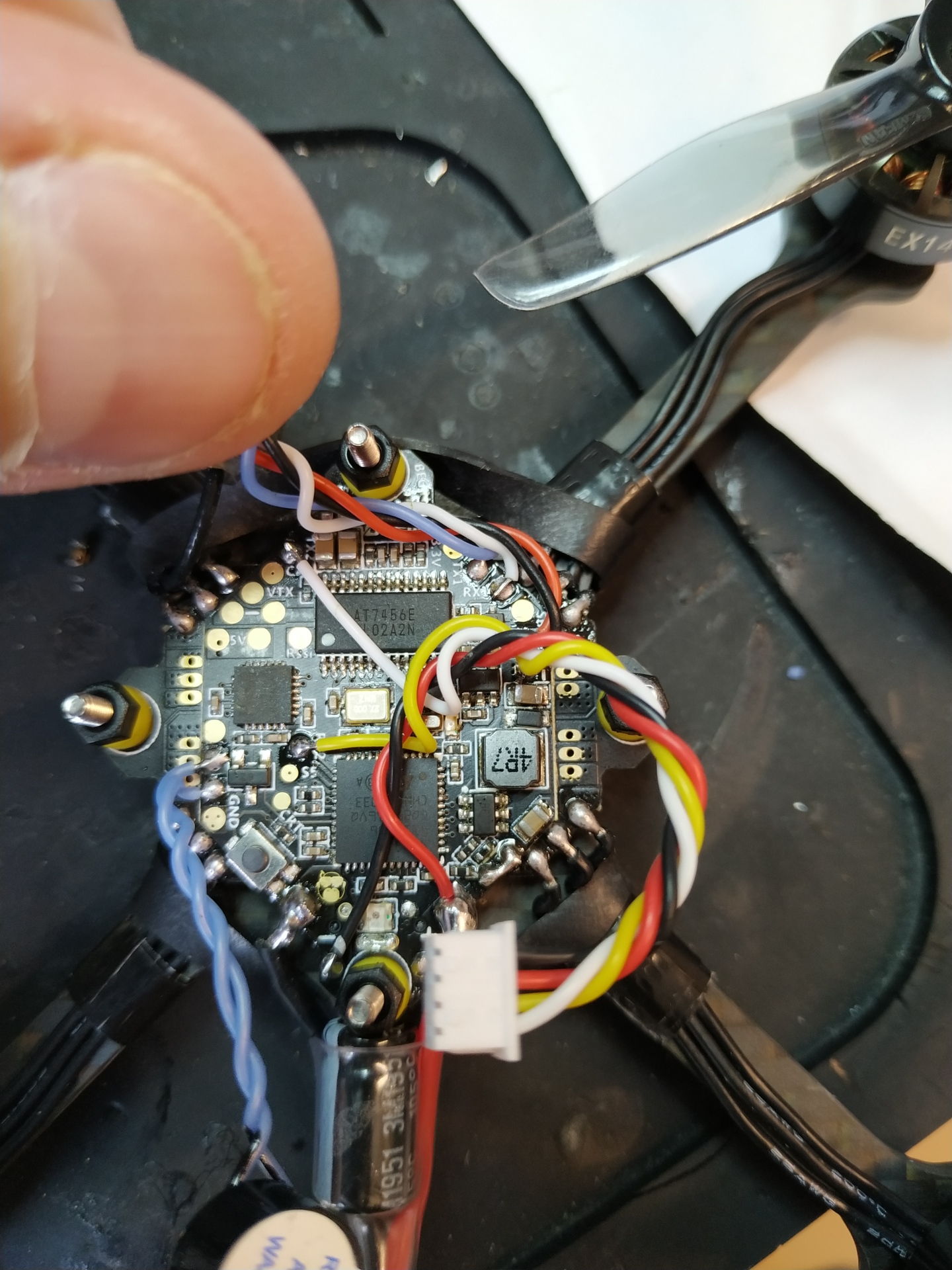
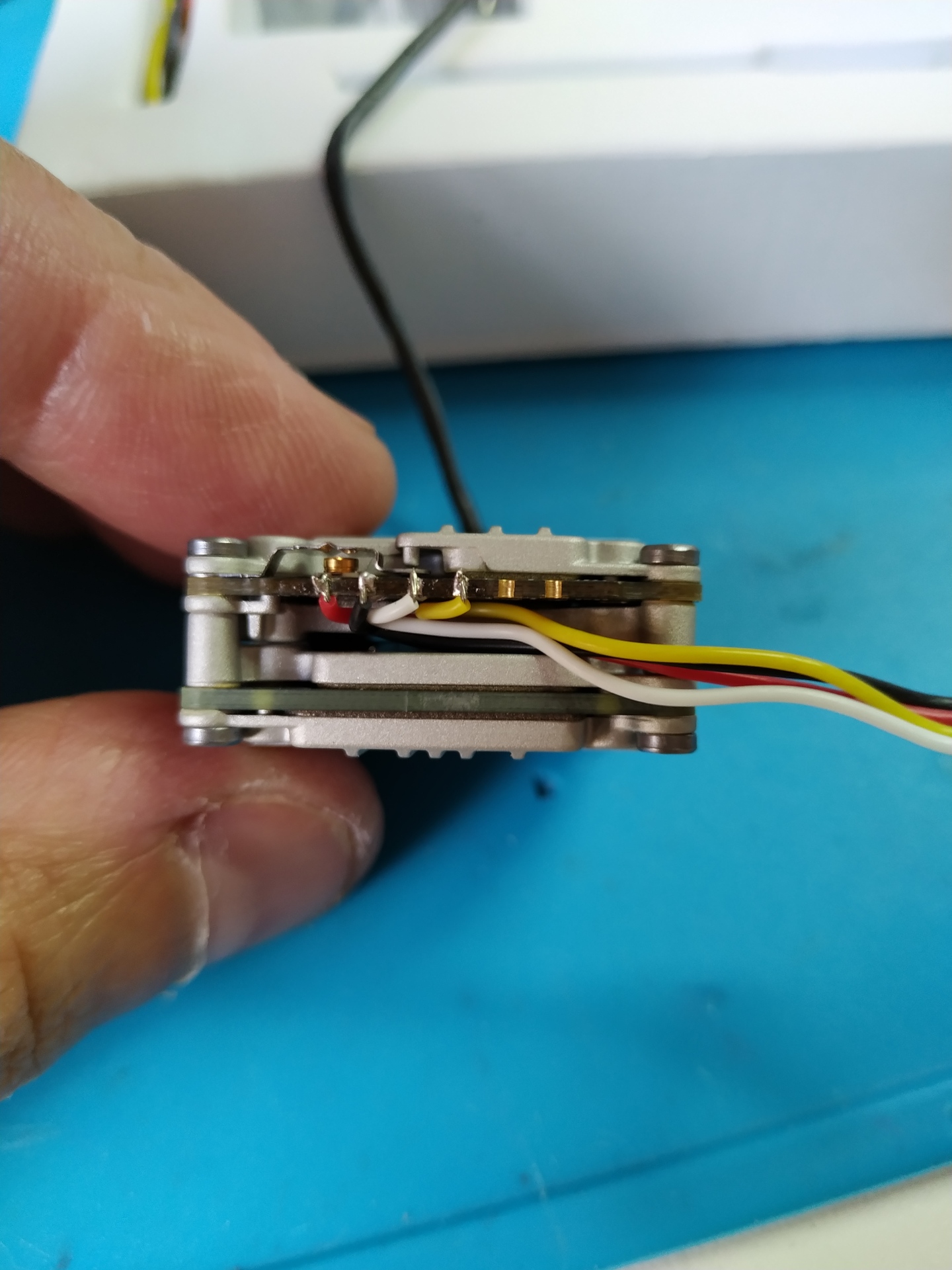
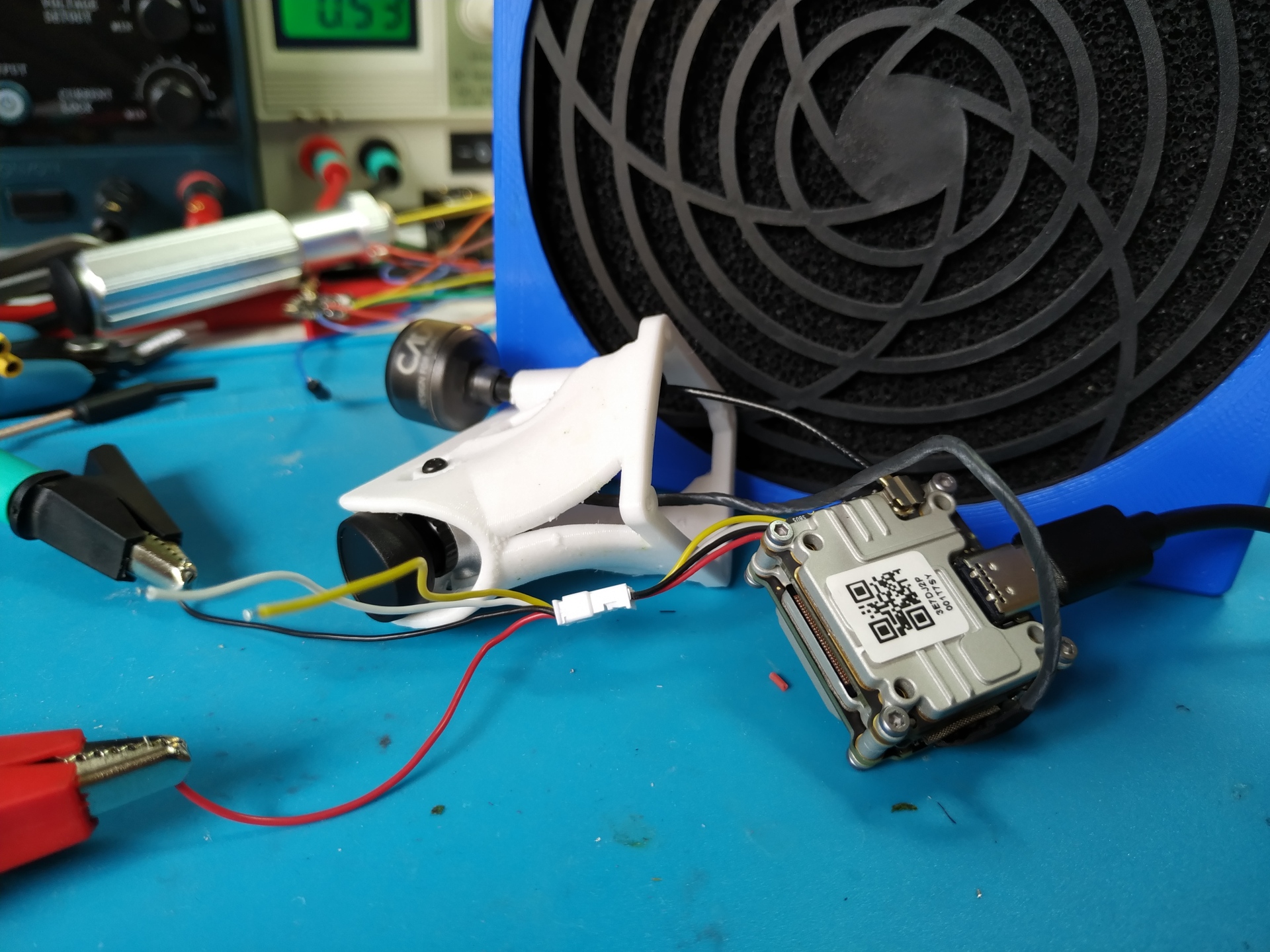
As i got myself a set of DJI FPV Goggles i needed a small quad to test the new HD system. I had some 1404 Motors and a Whoop style Board lying around, so i cut a slightly modified 3„ Sanchez frame and printed a nice TPU canopy found on thingiverse.
A 2nd backup frame has been build with other parts i had around: Flightcontroller: Crazybee F4 PRO V3.0, Motors: 4x RCX H1304 5000KV.
3 Others for friend of mine have been build using either the JHEMCU GHF13 AIO or the JHEMCU GHF411AIO Pro. They are all running the Happymodel EX1404 4800KV motors with GemFan 3016 props.
Pics:


















Links:
Settings:
Use Custom Betaflight for BF warnings on DJI OSD
Settings for the GHF13 Board
# # diff all # version # Betaflight / STM32F411 (S411) 4.2.8 Mar 19 2021 / 21:01:25 (norevision) MSP API: 1.43 # config: manufacturer_id: MTKS, board_name: MATEKF411, version: be0c9205, date: 2020-01-15T19:44:32Z # start the command batch batch start # reset configuration to default settings defaults nosave board_name MATEKF411 manufacturer_id MTKS mcu_id 004e00523235511832333634 signature # name: dragonfrog # resources resource SERVO 1 A00 resource LED_STRIP 1 NONE resource SERIAL_TX 11 A08 resource SERIAL_RX 11 A08 # serial serial 0 1 115200 57600 0 115200 serial 1 64 115200 57600 0 115200 serial 30 2 115200 57600 0 115200 # aux aux 0 0 0 1700 2100 0 0 aux 1 1 1 900 1300 0 0 aux 2 2 1 1300 1700 0 0 aux 3 13 3 1700 2100 0 0 # master set acc_calibration = 1,-9,-105,1 set rssi_channel = 16 set serialrx_provider = CRSF set failsafe_switch_mode = STAGE2 set bat_capacity = 850 set vbat_scale = 112 set ibata_scale = 309 set gps_auto_config = OFF set gps_rescue_min_sats = 5 set gps_rescue_allow_arming_without_fix = ON set report_cell_voltage = ON set osd_warn_rssi = ON set osd_warn_dji = ON set osd_cap_alarm = 800 set osd_vbat_pos = 2419 set osd_rssi_pos = 2197 set osd_link_quality_pos = 121 set osd_rssi_dbm_pos = 89 set osd_tim_2_pos = 407 set osd_flymode_pos = 2183 set osd_vtx_channel_pos = 65 set osd_crosshairs_pos = 2286 set osd_current_pos = 2374 set osd_mah_drawn_pos = 2406 set osd_craft_name_pos = 2224 set osd_warnings_pos = 14794 set osd_avg_cell_voltage_pos = 2387 set osd_stat_max_spd = OFF set osd_stat_bbox = OFF set osd_stat_bb_no = OFF set gyro_1_align_yaw = 1800 set name = dragonfrog profile 0 profile 1 profile 2 # restore original profile selection profile 0 rateprofile 0 rateprofile 1 rateprofile 2 rateprofile 3 rateprofile 4 rateprofile 5 # restore original rateprofile selection rateprofile 0 # save configuration save #
Ich garantiere bei meinen Bauberichten und Teilelisten keine Vollständigkeit etc...es wird aus den Teilen gebastelt die gerade herumliegen.
Bitte keine Anfragen zum Bau/Fräsen von Frames, Teilen oder sonstigen Aufträgen. Ich betreibe die Seite rein als Hobby und nutze die zur Verfügung stehende Zeit gerne für meine eigenen Projekte.
Bei einigen Projekten werde ich zu gegebener Zeit die Pläne veröffentlichen - aber auch hier lasse ich mich ungern hetzten ;-)
No waranties for completeness of any contructions, part lists etc.. I build from party i have just lying around in my workshop.
Please, No requests to buy frames, builds, etc.. I run this page in my spare-time and as hobby only. Want to keep my free time to work on my own projects - sorry
I will release the plans for some build at some point in time, but again, please don't ask for unreleased plans, i don't want to get rushed ;-)
Seiten-Werkzeuge
