
Benutzer-Werkzeuge
Seitenleiste
Dies ist eine alte Version des Dokuments!
Inhaltsverzeichnis
Fricklick Mini
After reading some threads about the very efficient Mavic Mini Motors and finding a cheap source on Aliexpress, i decided to try some builds with them.
|
|
|
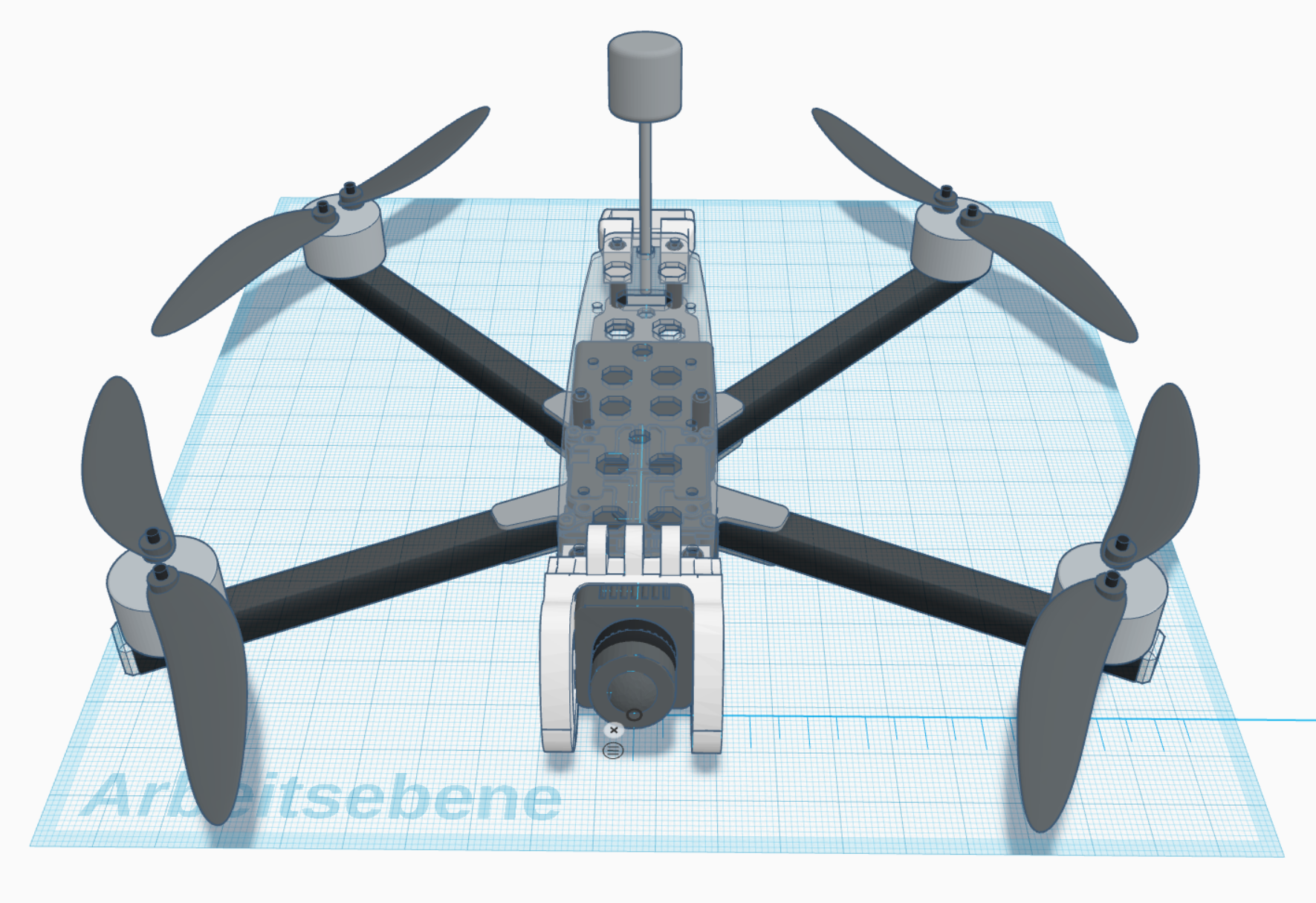
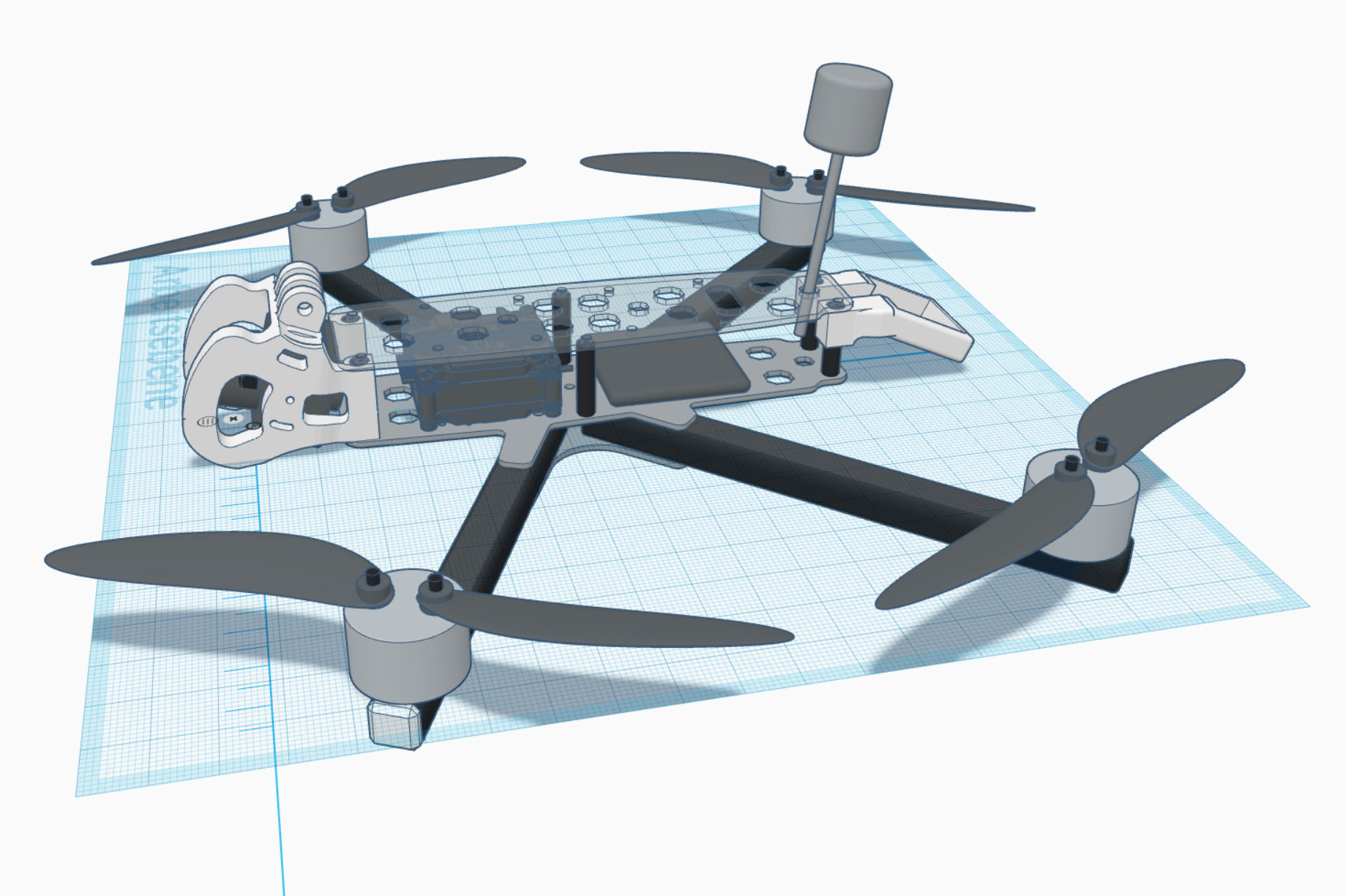
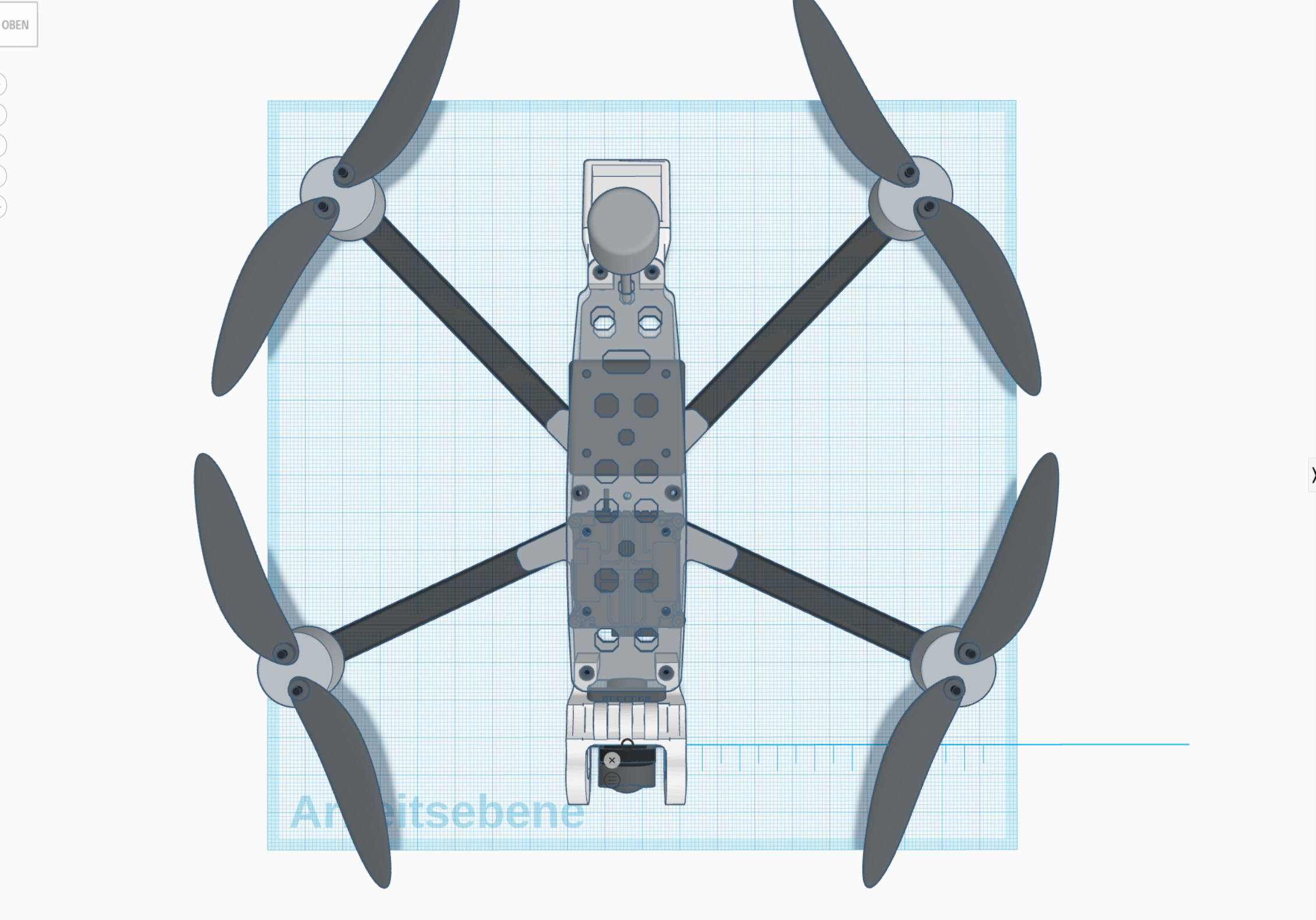
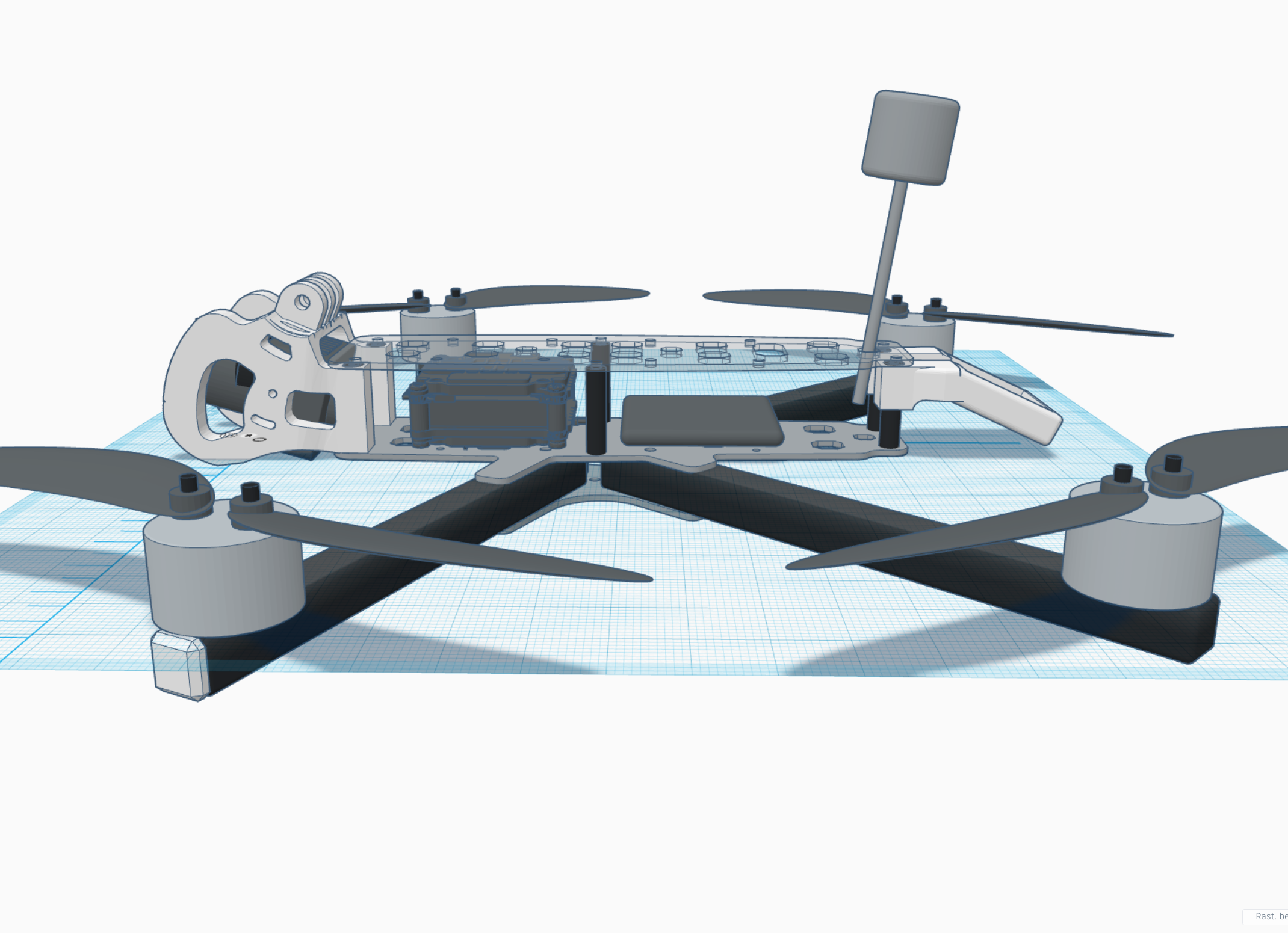
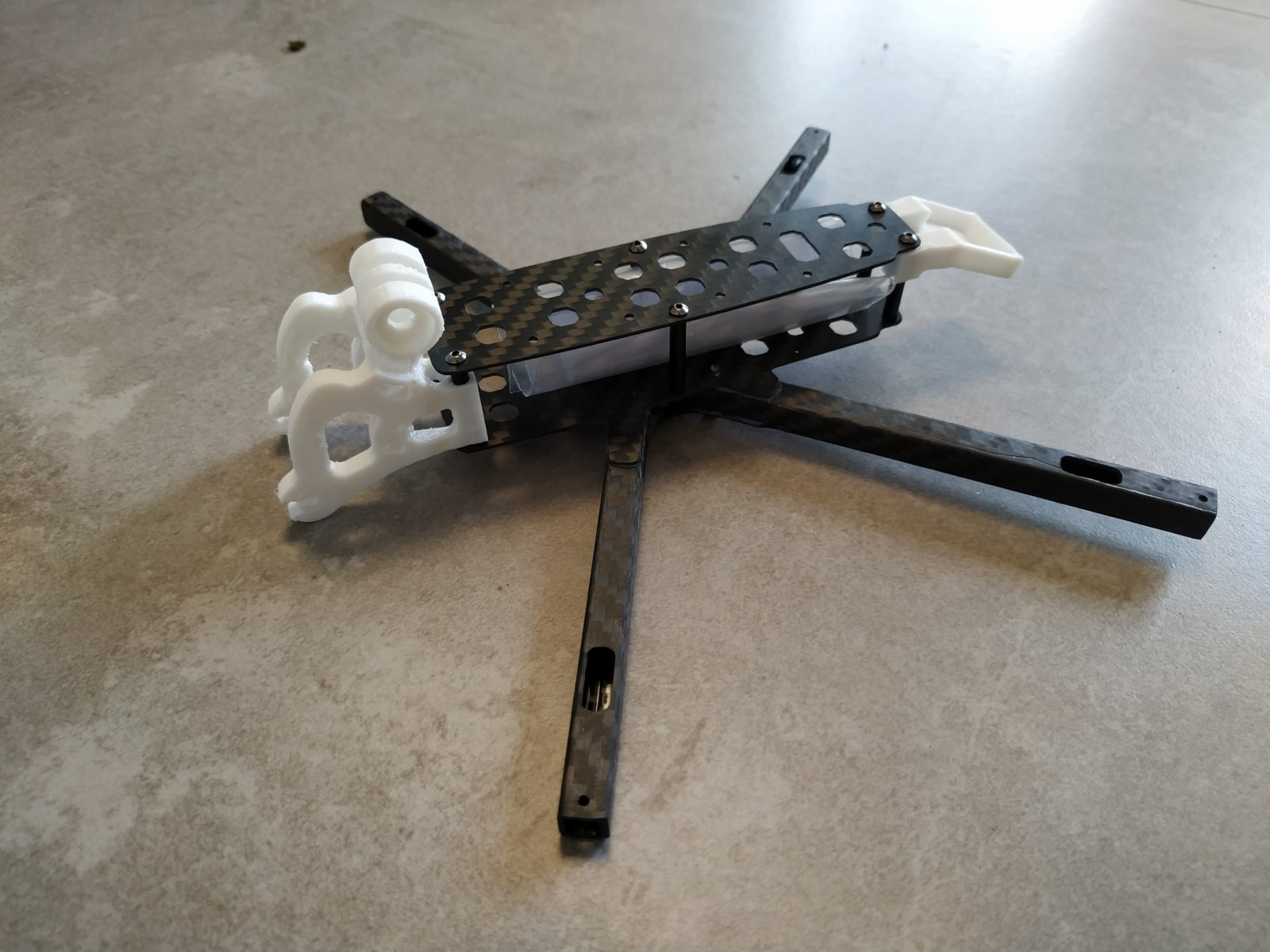
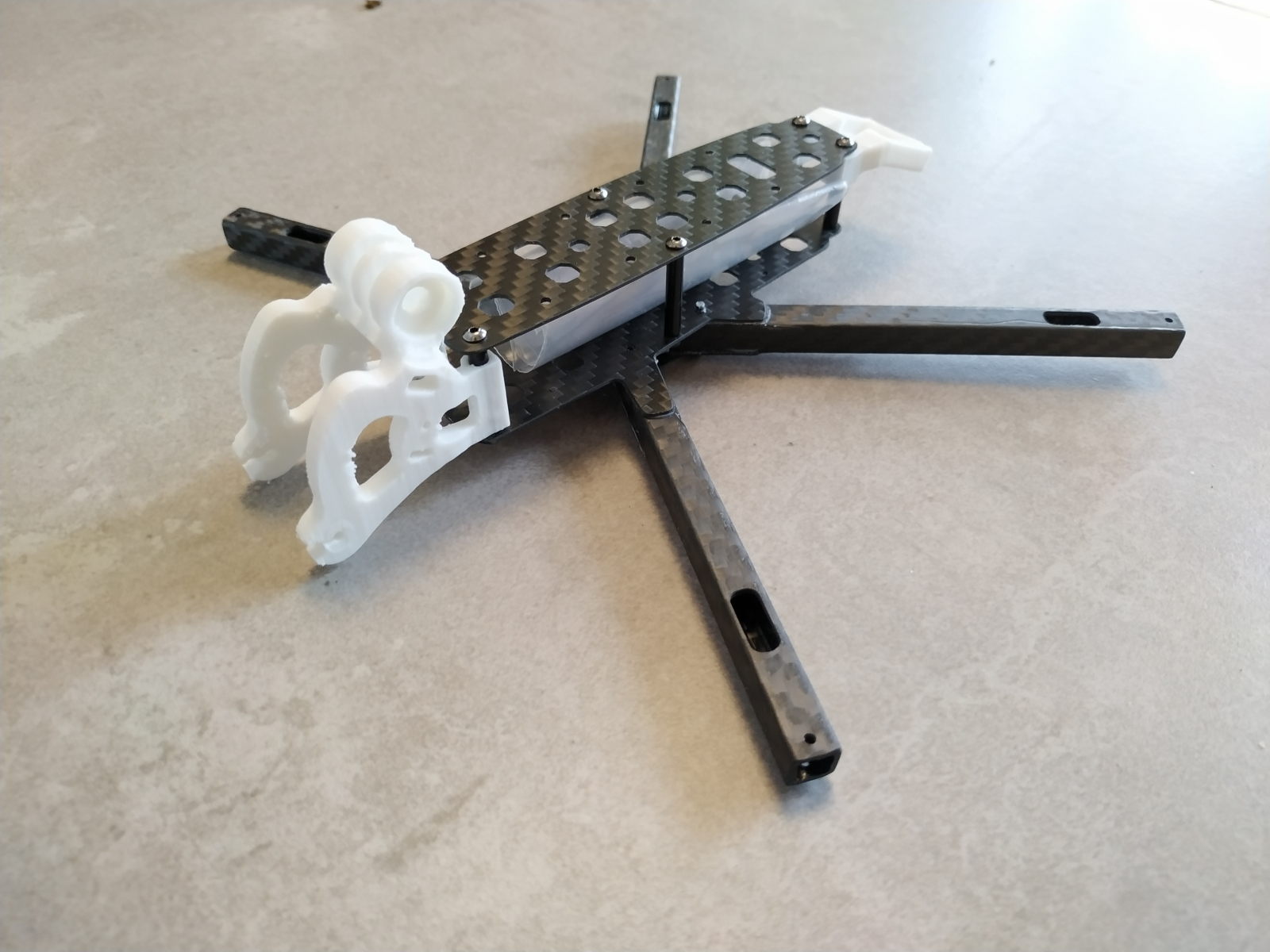
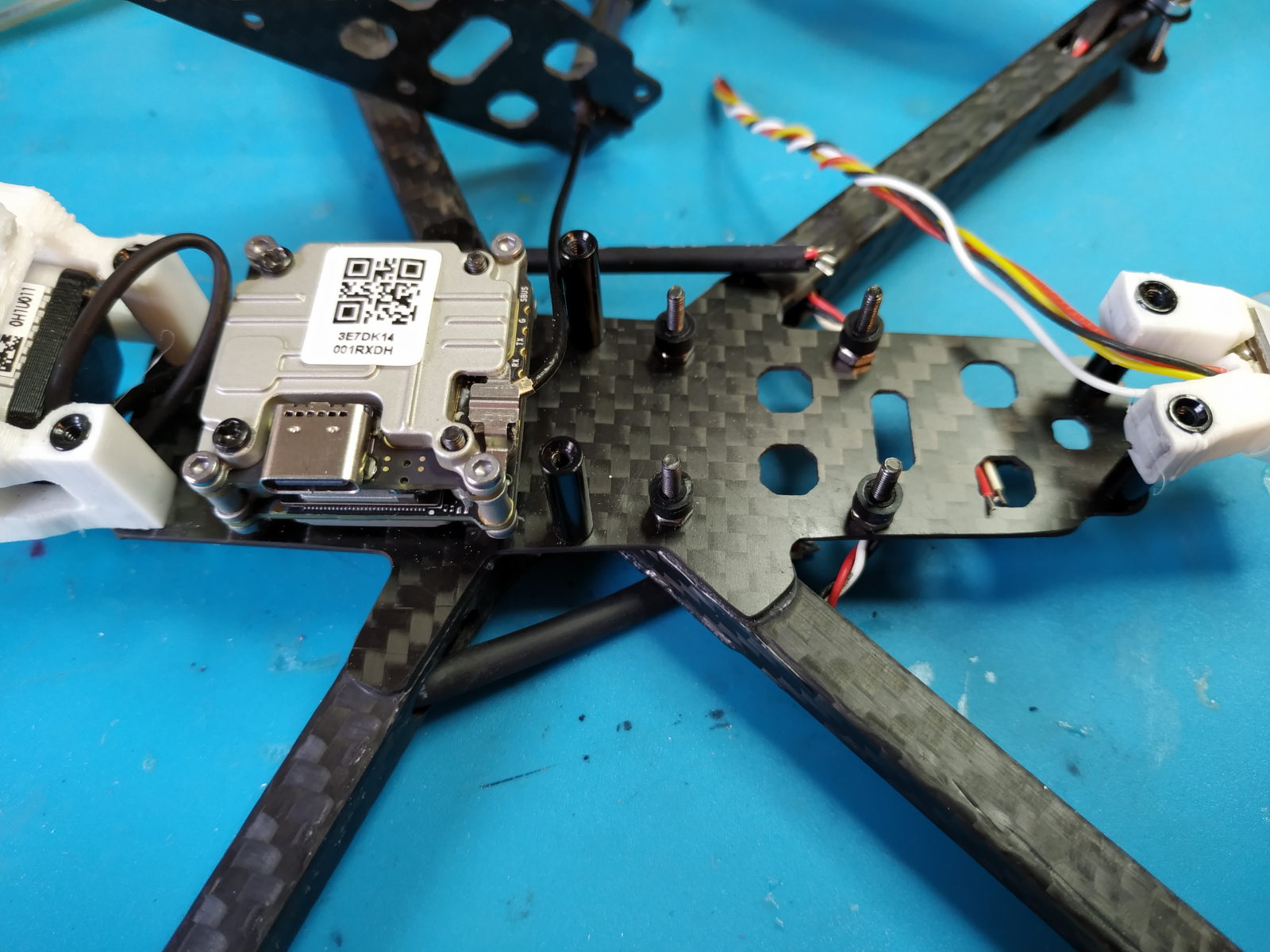
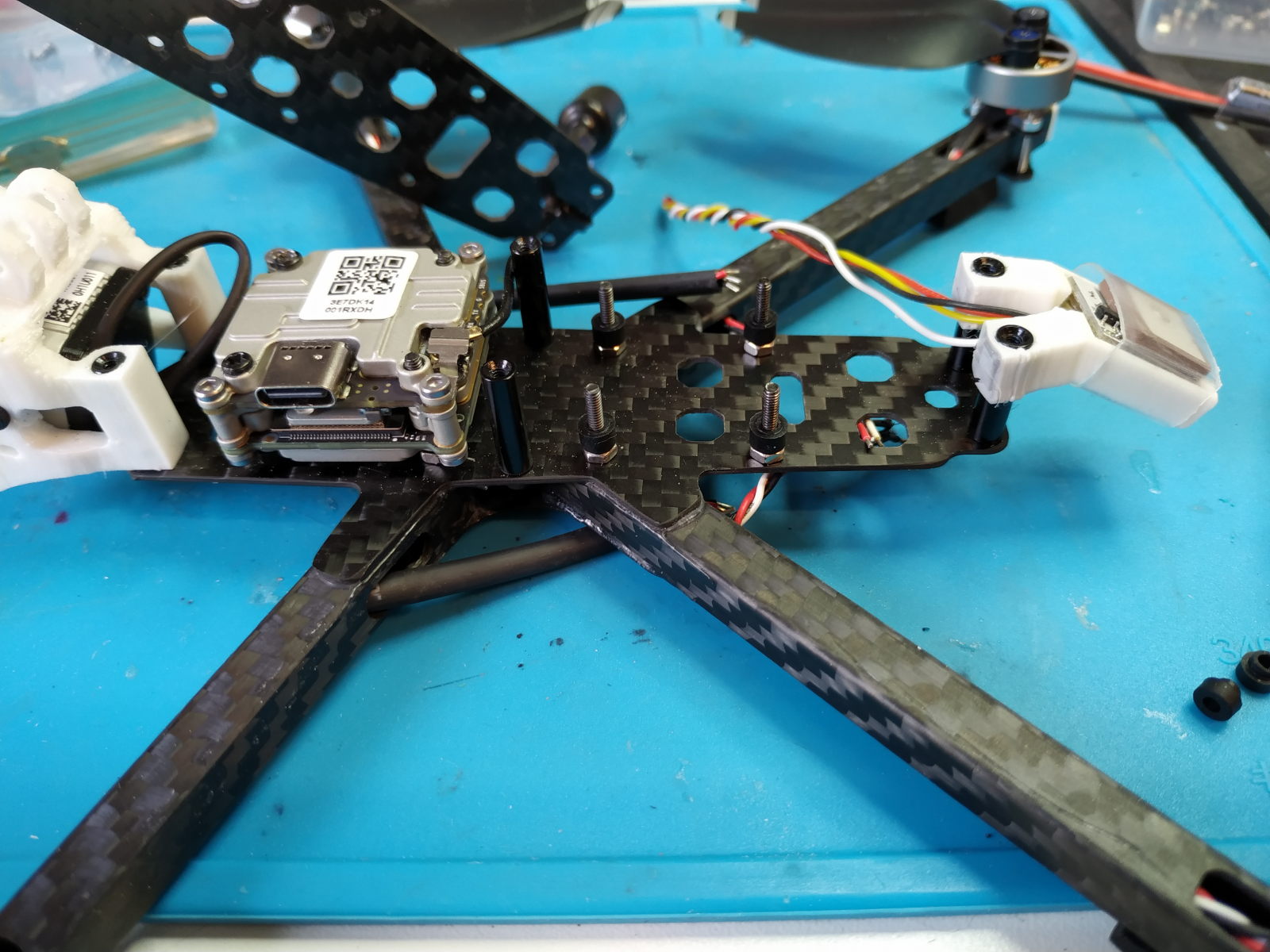
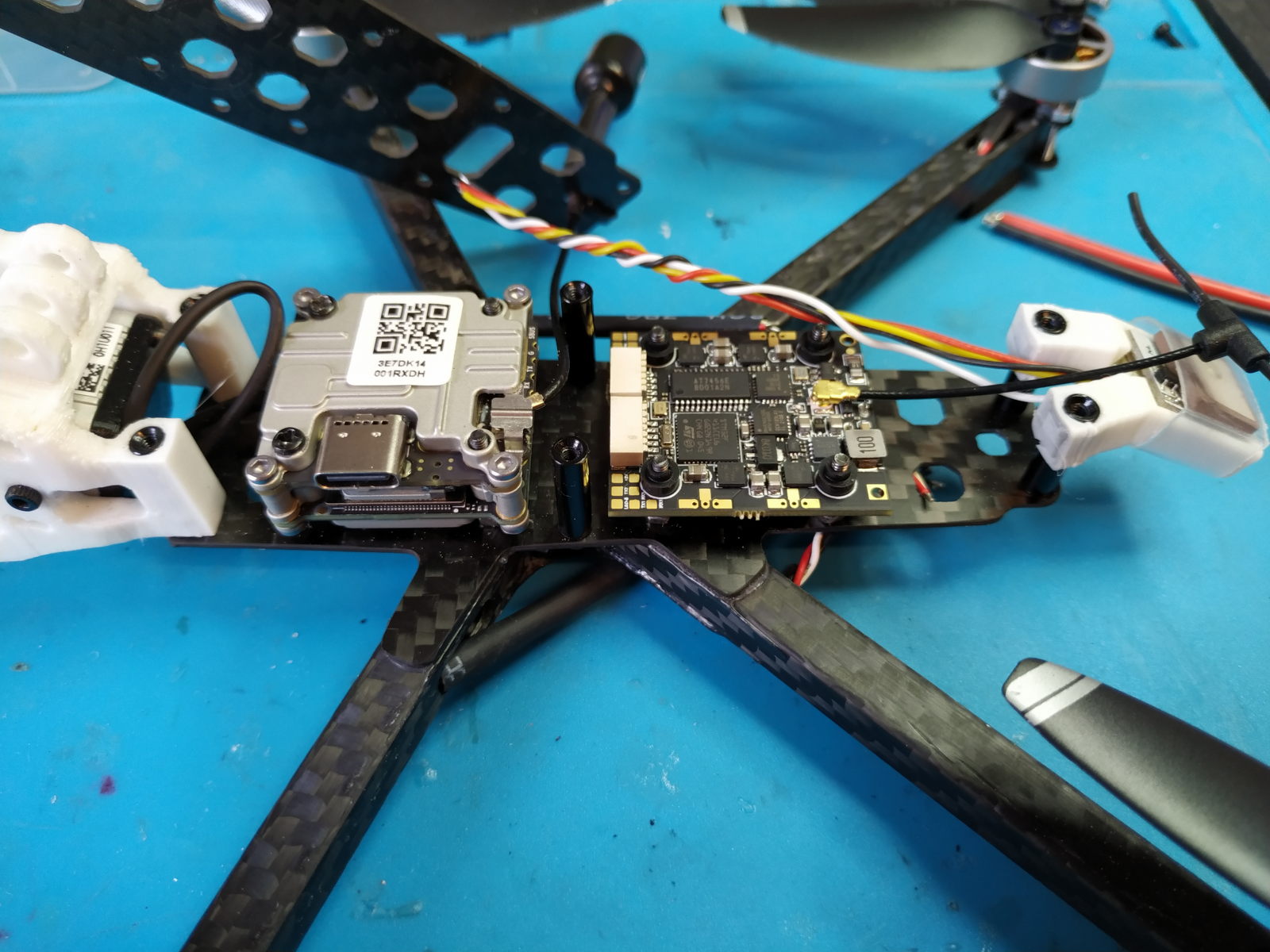
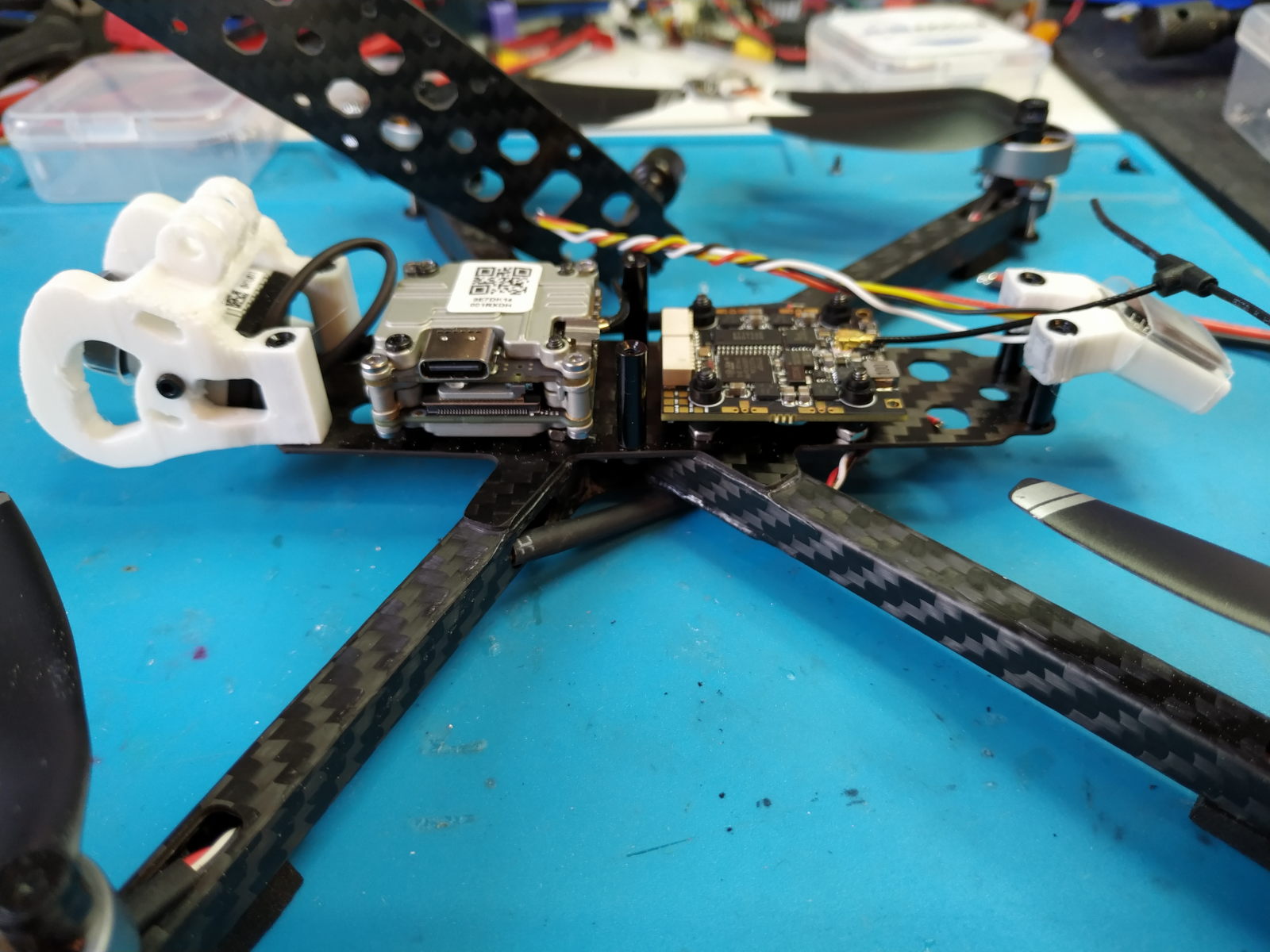
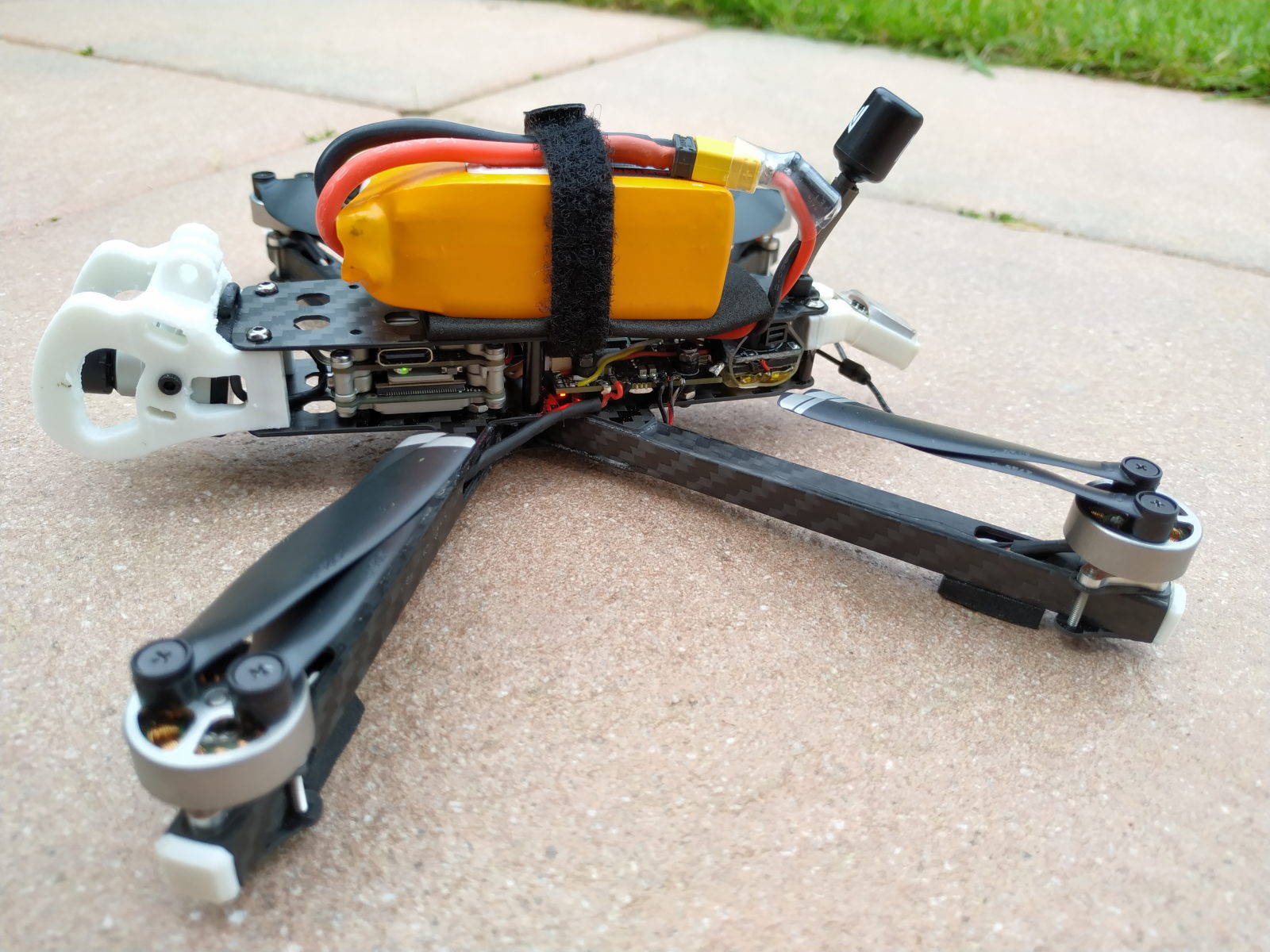
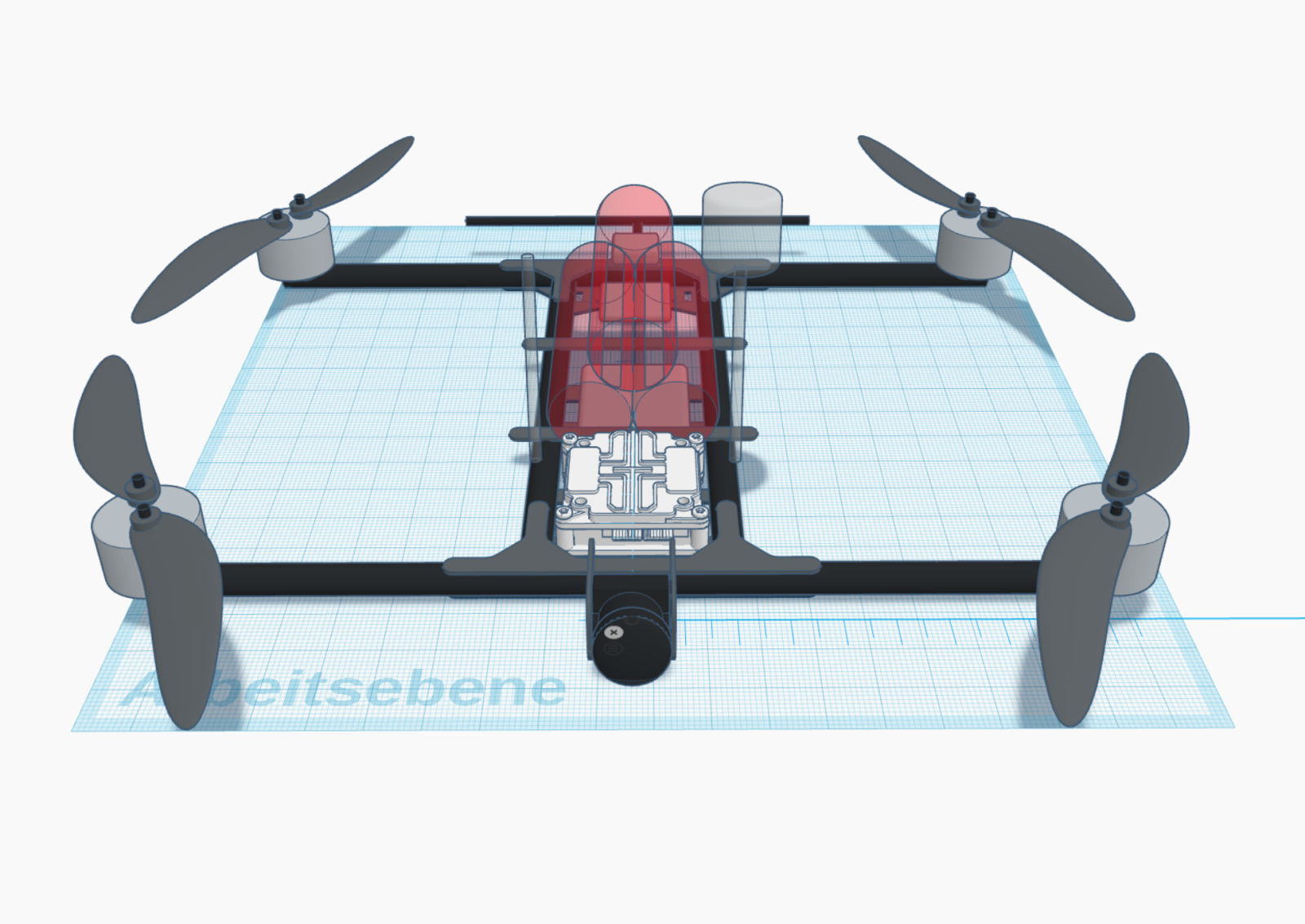
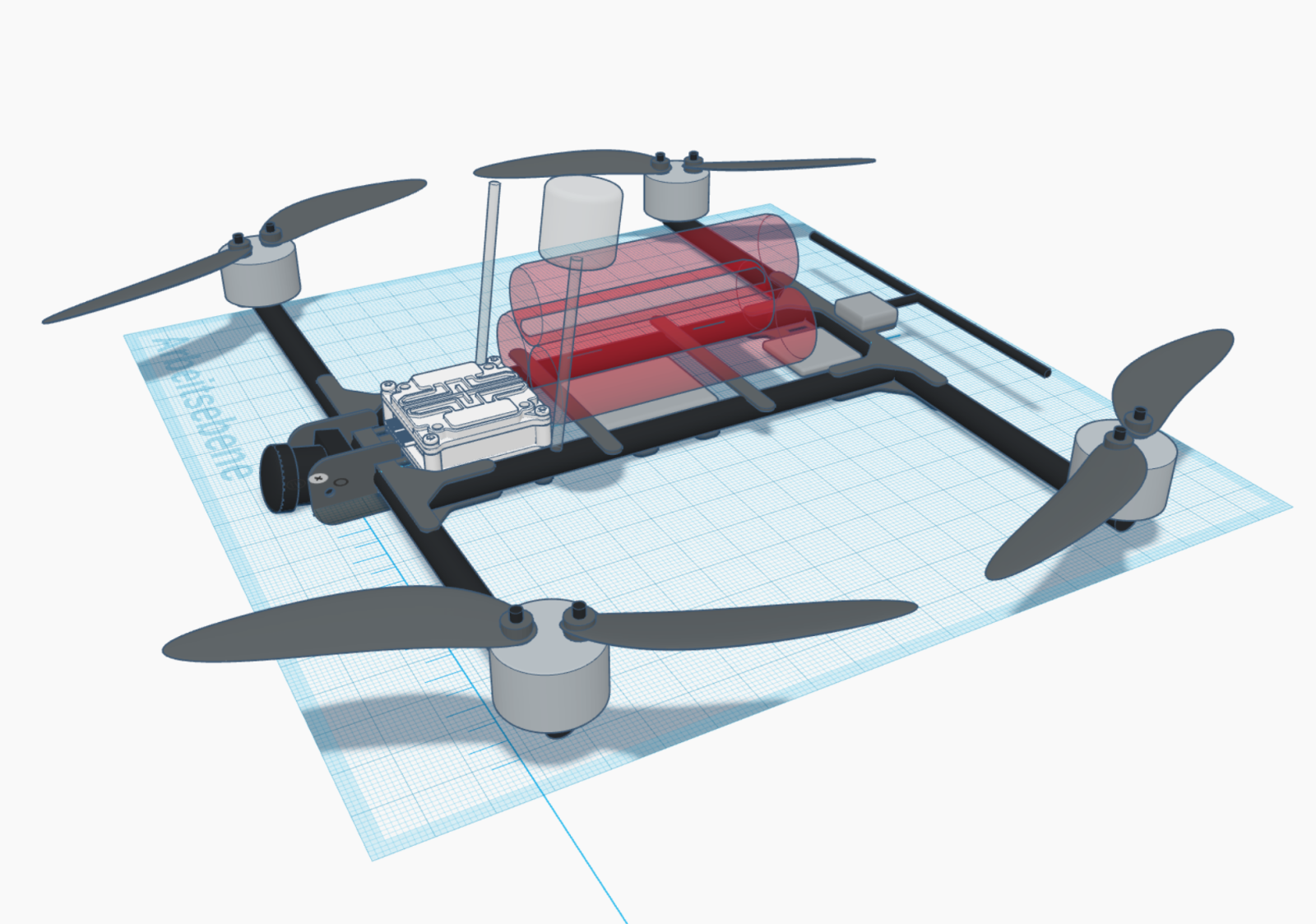
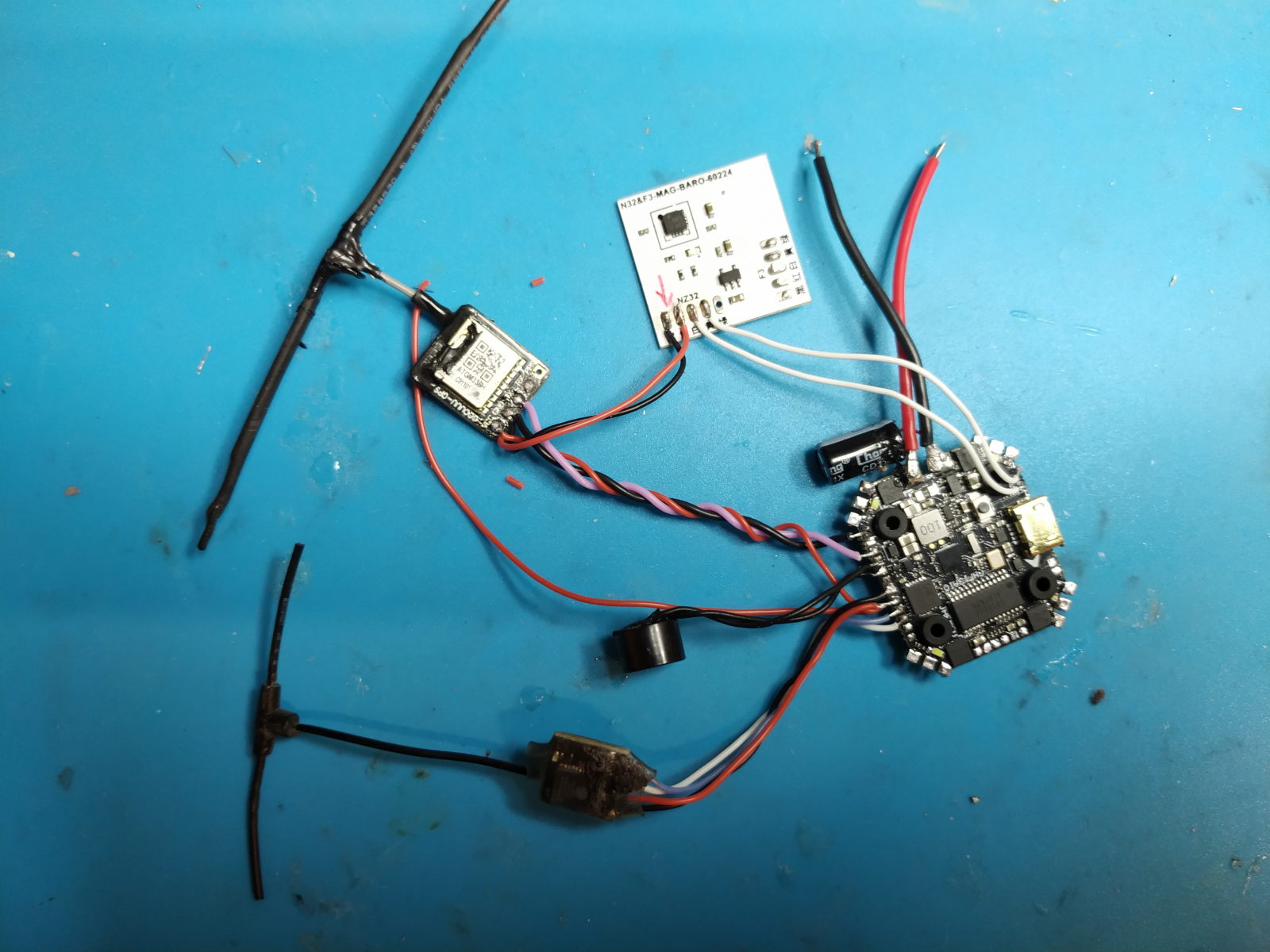
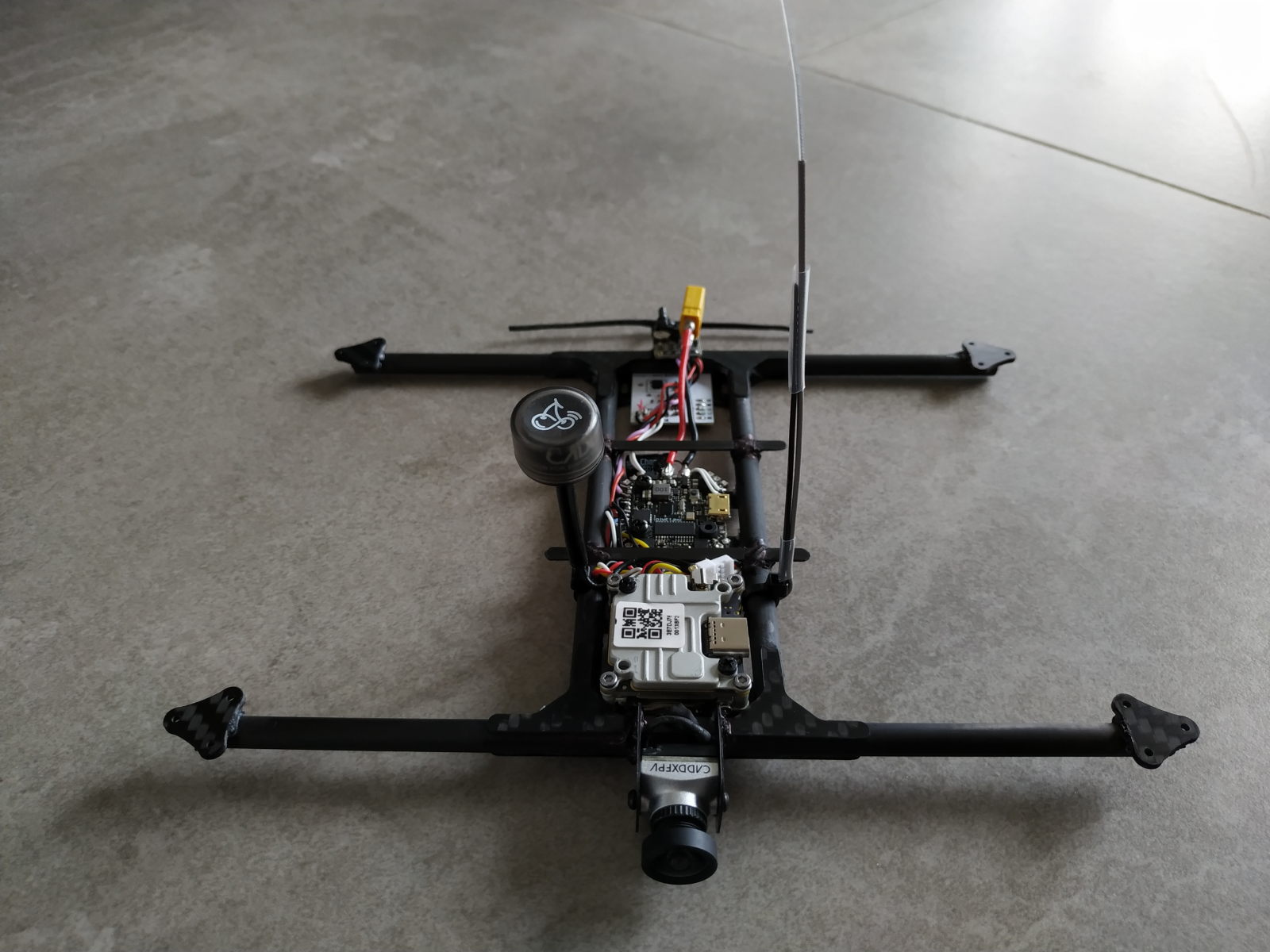
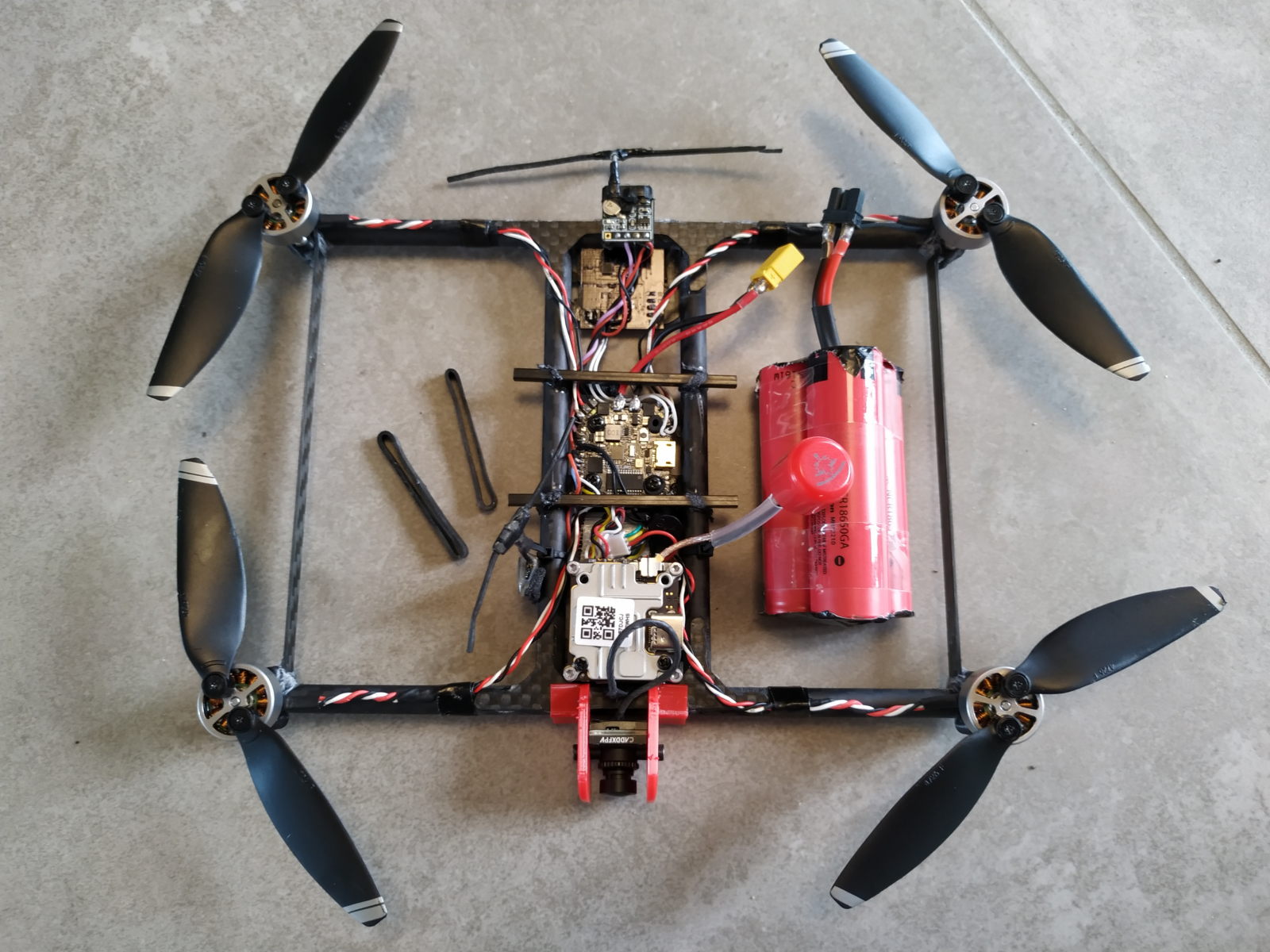
This one should give a nice and handy mid-range-time cruiser. Its not build at a total minimum weight, but should be a strong and reliable frame. So far its looking wuite good. first tests seem to be quite promising. Still not sure what will be the final battery for this, so far i tested it from 2S550 over 3S850 to 3S3400LiIon. The Happymodel X1 Board with build-in ELRS and DJI Connector makes it quite simple to wire.
Pics:
























Fricklick Mini UL
Operation: Broken Arroy - at least thats what its made from 
|
|
|
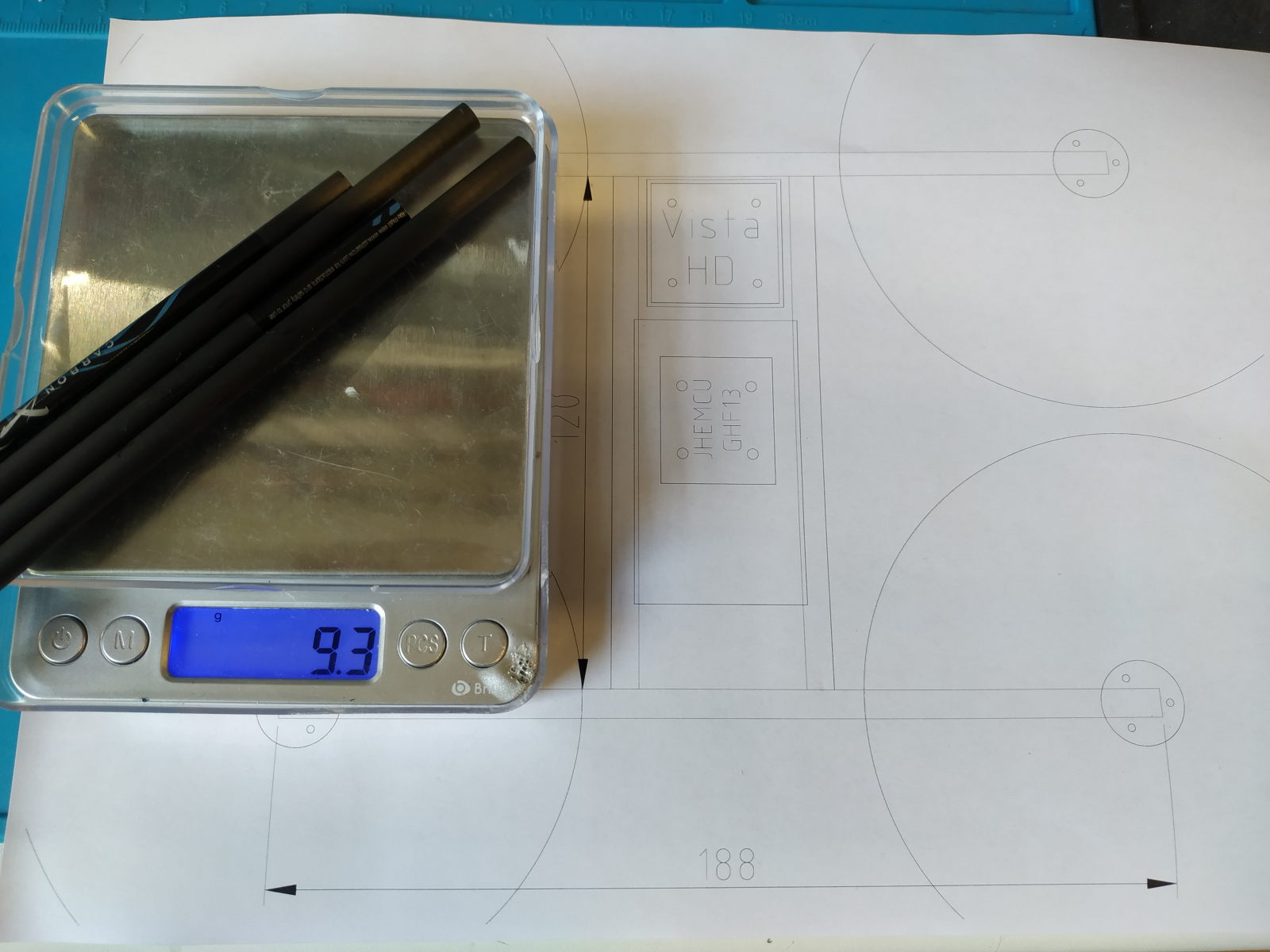
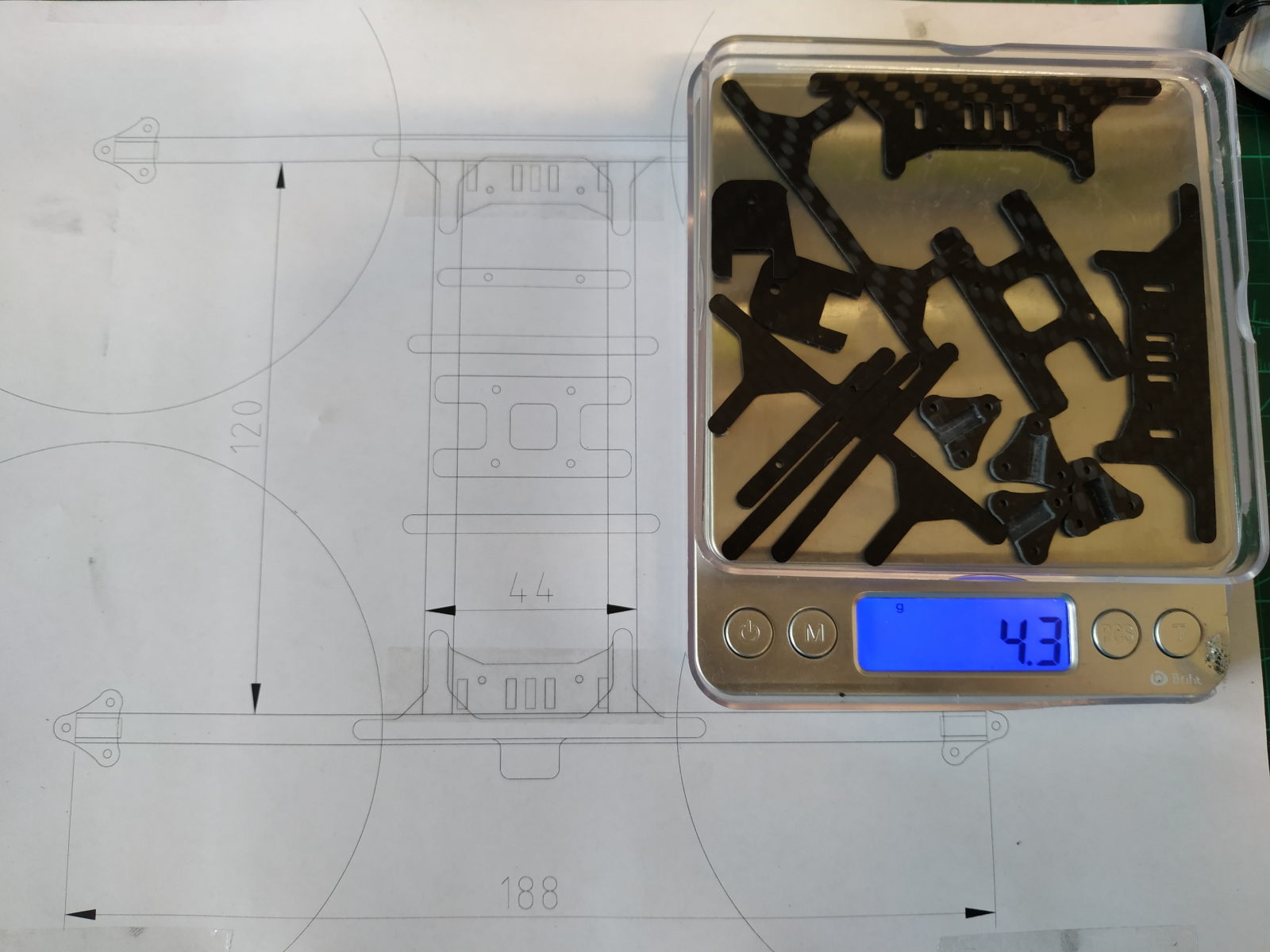
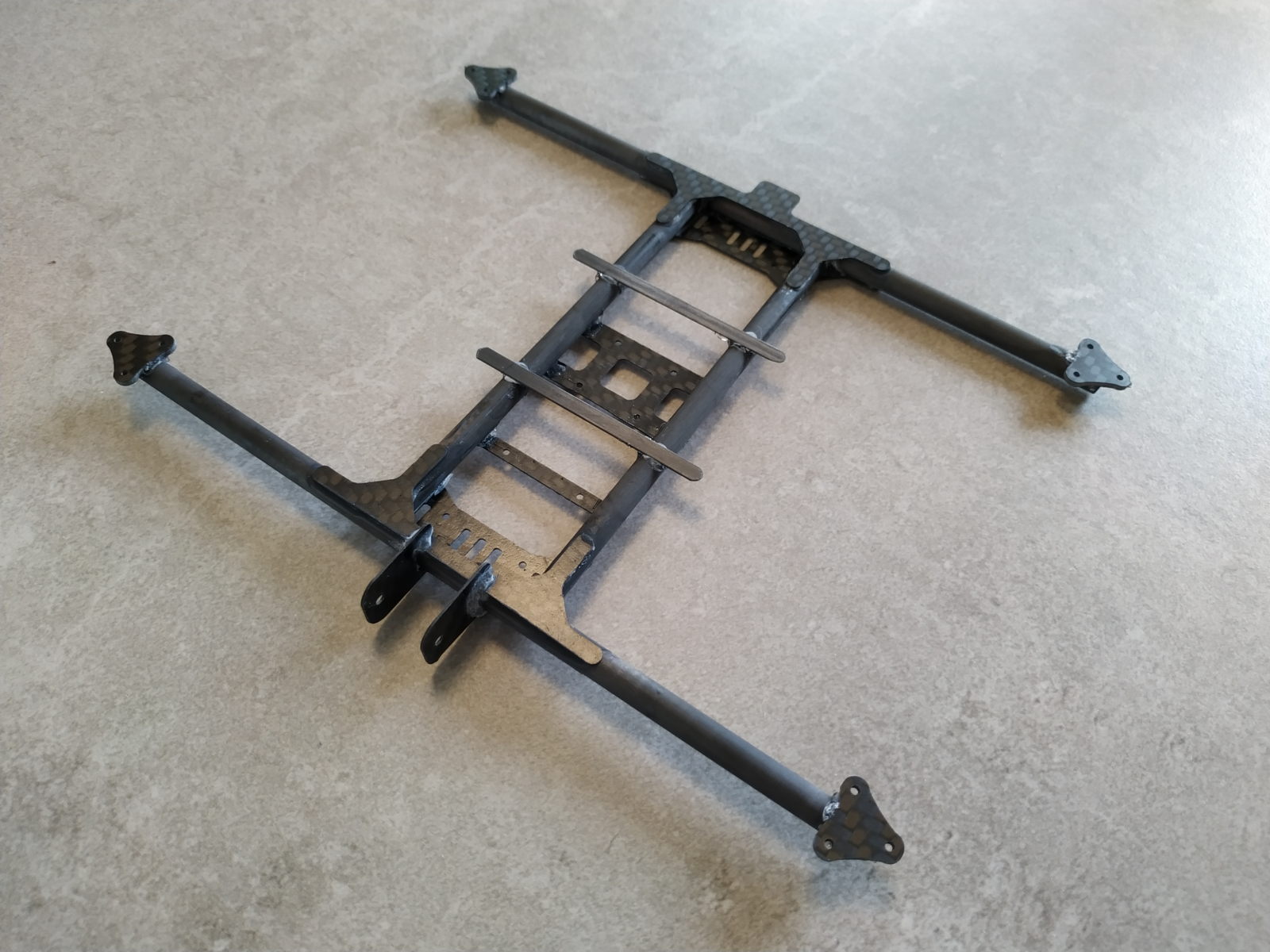
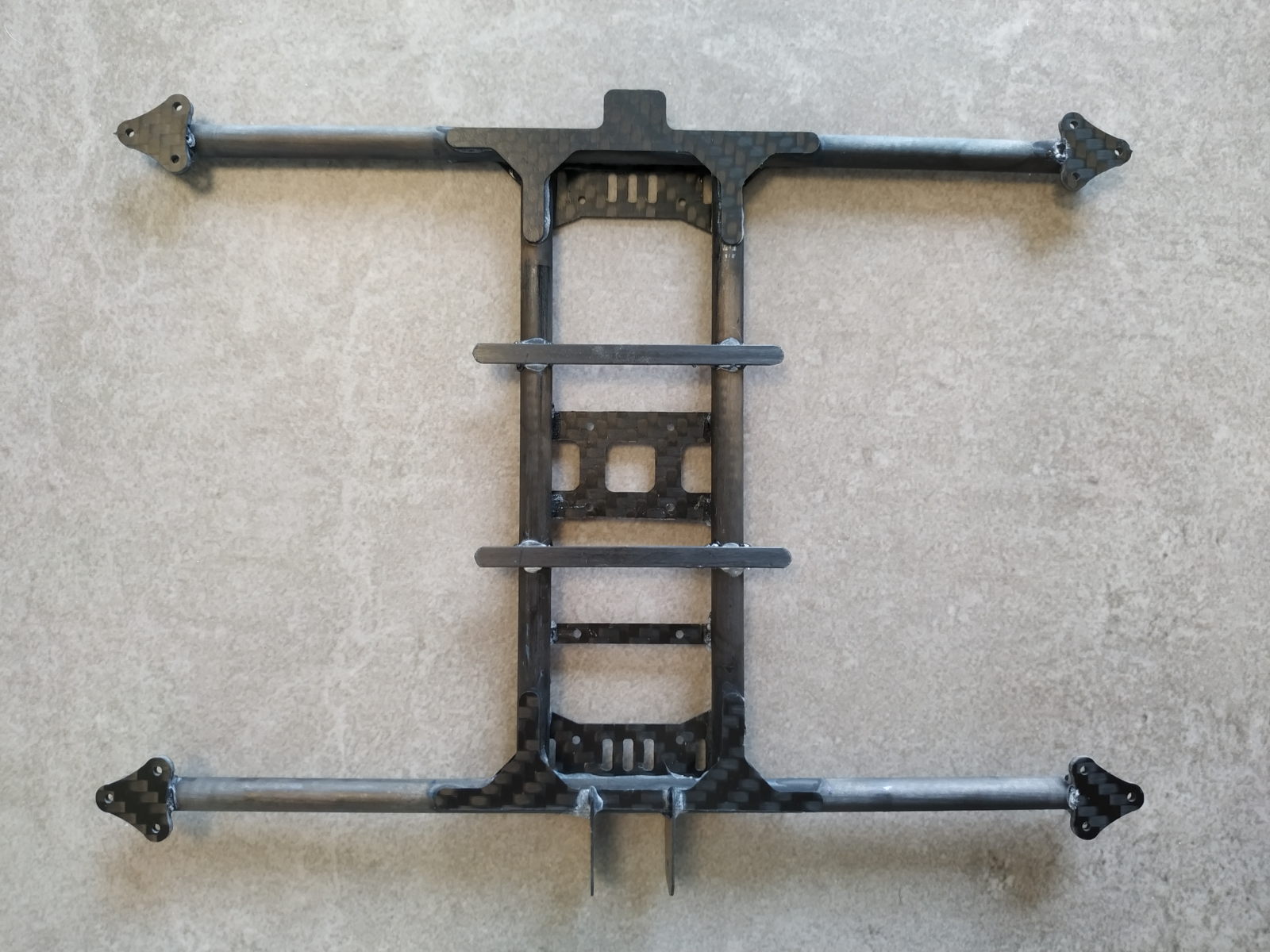
The 2nd set of motors went into an ultra-light frame build (actually i build this one first, but had both ones planed already) similar to other H-Tube Frames i build years ago. As i had some broken 6mm CFK bow arrows lying around i decided to gibe them a try. Well, the frame is very light and looks strong, but the CFK Tube is extruded and not made from 3k fabric, which allows them to twist along the tube. In combination with the very floppy folding props, this produces a lot of vibration which lets the whole frame shake on certain rpms.
In general the frame design itself looks really promising, so i did a 2nd build with the new 7/6mm woven tube that i just got - weight for is seems to be nearly the same, but it still had oscillations due to torsion on the arms. Last option was to add some 1mm CFK spars on the end of the arms which solved the problem. As they only weight 2.5g for both, i made it to fit the AUW just below 250g.
Pics:























Videos:
First flight: 37min, 25km traveled
Links:
Settings:
Fricklick Mini
# version # Betaflight / CRAZYBEEF4SX1280 (HAMO) 4.3.0 Apr 15 2022 / 14:09:06 (8597615a1) MSP API: 1.44 # start the command batch batch start # reset configuration to default settings defaults nosave board_name CRAZYBEEF4SX1280 mcu_id 001d004d4e56500720363955 signature # name: RSSI LOW # feature feature GPS # serial serial 0 2 115200 9600 0 115200 serial 1 1 115200 57600 0 115200 # beeper beeper -SYSTEM_INIT # beacon beacon RX_LOST beacon RX_SET # aux aux 0 0 0 1700 2100 0 0 aux 1 1 1 900 1300 0 0 aux 2 2 1 1300 1700 0 0 aux 3 46 2 1300 1700 0 0 aux 4 13 3 1700 2100 0 0 aux 5 35 2 1700 2100 0 0 # master set acc_calibration = -15,-27,72,1 set motor_pwm_protocol = DSHOT300 set failsafe_switch_mode = STAGE2 set failsafe_procedure = GPS-RESCUE set bat_capacity = 3000 set vbat_min_cell_voltage = 250 set vbat_warning_cell_voltage = 280 set ibata_scale = 472 set small_angle = 180 set gps_auto_config = OFF set gps_rescue_initial_alt = 40 set gps_rescue_descent_dist = 30 set gps_rescue_ground_speed = 1500 set gps_rescue_throttle_max = 1700 set gps_rescue_ascend_rate = 400 set gps_rescue_throttle_hover = 1500 set gps_rescue_min_sats = 6 set gps_rescue_min_dth = 50 set gps_rescue_allow_arming_without_fix = ON set gps_rescue_alt_mode = FIXED_ALT set report_cell_voltage = ON set osd_warn_rssi = ON set osd_vbat_pos = 2483 set osd_rssi_pos = 2197 set osd_link_quality_pos = 2104 set osd_rssi_dbm_pos = 2137 set osd_tim_2_pos = 407 set osd_flymode_pos = 2119 set osd_vtx_channel_pos = 65 set osd_crosshairs_pos = 2286 set osd_current_pos = 2439 set osd_mah_drawn_pos = 2471 set osd_craft_name_pos = 2262 set osd_gps_speed_pos = 2183 set osd_gps_lon_pos = 2540 set osd_gps_lat_pos = 2536 set osd_gps_sats_pos = 2228 set osd_home_dir_pos = 2479 set osd_home_dist_pos = 2510 set osd_flight_dist_pos = 2246 set osd_altitude_pos = 2214 set osd_warnings_pos = 14346 set osd_avg_cell_voltage_pos = 2451 set osd_stat_max_spd = OFF set osd_stat_bbox = OFF set osd_stat_bb_no = OFF set expresslrs_uid = 146,114,224,67,224,253 set expresslrs_rate_index = 1 set name = RSSI LOW profile 0 profile 1 profile 2 # restore original profile selection profile 0 rateprofile 0 # rateprofile 0 set throttle_limit_type = SCALE set throttle_limit_percent = 80 rateprofile 1 rateprofile 2 rateprofile 3 rateprofile 4 rateprofile 5 # restore original rateprofile selection rateprofile 0 # save configuration save
Fricklick Mini UL
# version # INAV/MATEKF411_RSSI 4.1.0 Feb 11 2022 / 10:56:36 (611d26f4) # GCC-10.2.1 20201103 (release) # start the command batch batch start # reset configuration to default settings defaults noreboot # resources # mixer mmix reset mmix 0 1.000 -1.000 1.000 -1.000 mmix 1 1.000 -1.000 -1.000 1.000 mmix 2 1.000 1.000 1.000 1.000 mmix 3 1.000 1.000 -1.000 -1.000 # servo mix # servo # safehome # logic # gvar # pid # feature feature -TX_PROF_SEL feature GPS feature PWM_OUTPUT_ENABLE # beeper # blackbox blackbox -NAV_ACC blackbox NAV_POS blackbox NAV_PID blackbox MAG blackbox ACC blackbox ATTI blackbox RC_DATA blackbox RC_COMMAND blackbox MOTORS # map # serial serial 0 2097152 115200 115200 0 115200 serial 1 64 115200 115200 0 115200 serial 30 2 115200 38400 0 115200 # aux aux 0 0 0 1700 2100 aux 1 1 1 900 1700 aux 2 11 2 1300 1700 aux 3 10 2 1700 2100 aux 4 3 1 1300 1700 aux 5 13 3 1700 2100 # adjrange # rxrange # temp_sensor # wp #wp 0 invalid # osd_layout osd_layout 0 0 21 5 V osd_layout 0 1 19 11 V osd_layout 0 2 0 0 V osd_layout 0 7 4 3 V osd_layout 0 8 13 4 V osd_layout 0 9 1 2 H osd_layout 0 11 4 10 V osd_layout 0 12 4 11 V osd_layout 0 13 4 7 V osd_layout 0 14 20 6 V osd_layout 0 15 3 6 V osd_layout 0 20 14 14 V osd_layout 0 21 3 14 V osd_layout 0 22 15 12 V osd_layout 0 23 12 13 V osd_layout 0 28 1 11 H osd_layout 0 29 20 2 V osd_layout 0 30 1 0 V osd_layout 0 32 19 10 V osd_layout 0 36 2 7 H osd_layout 0 40 1 2 V # master set looptime = 500 set gyro_main_lpf_hz = 110 set gyro_main_lpf_type = PT1 set dynamic_gyro_notch_q = 250 set dynamic_gyro_notch_min_hz = 120 set setpoint_kalman_q = 200 set acc_hardware = MPU6000 set acczero_x = 10 set acczero_y = 14 set acczero_z = -27 set accgain_x = 4084 set accgain_y = 4103 set accgain_z = 4089 set align_mag = CW0 set mag_hardware = HMC5883 set magzero_x = -303 set magzero_y = -557 set magzero_z = -341 set maggain_x = 612 set maggain_y = 509 set maggain_z = 554 set baro_hardware = MS5611 set serialrx_provider = CRSF set blackbox_rate_denom = 2 set motor_pwm_protocol = DSHOT300 set failsafe_procedure = RTH set model_preview_type = 3 set applied_defaults = 2 set gps_provider = NMEA set airmode_type = THROTTLE_THRESHOLD set nav_extra_arming_safety = OFF set nav_rth_altitude = 3000 set report_cell_voltage = ON set i2c_speed = 800KHZ set dji_esc_temp_source = IMU set dji_rssi_source = CRSF_LQ set dji_use_adjustments = ON # profile profile 1 set mc_p_pitch = 35 set mc_i_pitch = 50 set mc_d_pitch = 25 set mc_p_roll = 35 set mc_i_roll = 50 set mc_p_yaw = 30 set mc_i_yaw = 60 set dterm_lpf_type = PT3 set d_boost_max = 1.500 set antigravity_gain = 2.000 set antigravity_accelerator = 5.000 set smith_predictor_delay = 1.500 set tpa_rate = 20 set tpa_breakpoint = 1200 set rc_yaw_expo = 70 set roll_rate = 70 set pitch_rate = 70 set yaw_rate = 60 # profile profile 2 # profile profile 3 # battery_profile battery_profile 1 set vbat_min_cell_voltage = 280 set vbat_warning_cell_voltage = 300 set throttle_scale = 0.600 # battery_profile battery_profile 2 # battery_profile battery_profile 3 # restore original profile selection profile 1 battery_profile 1 # save configuration save
Ich garantiere bei meinen Bauberichten und Teilelisten keine Vollständigkeit etc...es wird aus den Teilen gebastelt die gerade herumliegen.
Bitte keine Anfragen zum Bau/Fräsen von Frames, Teilen oder sonstigen Aufträgen. Ich betreibe die Seite rein als Hobby und nutze die zur Verfügung stehende Zeit gerne für meine eigenen Projekte.
Bei einigen Projekten werde ich zu gegebener Zeit die Pläne veröffentlichen - aber auch hier lasse ich mich ungern hetzten ;-)
No waranties for completeness of any contructions, part lists etc.. I build from party i have just lying around in my workshop.
Please, No requests to buy frames, builds, etc.. I run this page in my spare-time and as hobby only. Want to keep my free time to work on my own projects - sorry
I will release the plans for some build at some point in time, but again, please don't ask for unreleased plans, i don't want to get rushed ;-)
Seiten-Werkzeuge
