
Benutzer-Werkzeuge
Seitenleiste
Mini Quattrocopter


|
VERSION:
|
V1
|
V2.5
|
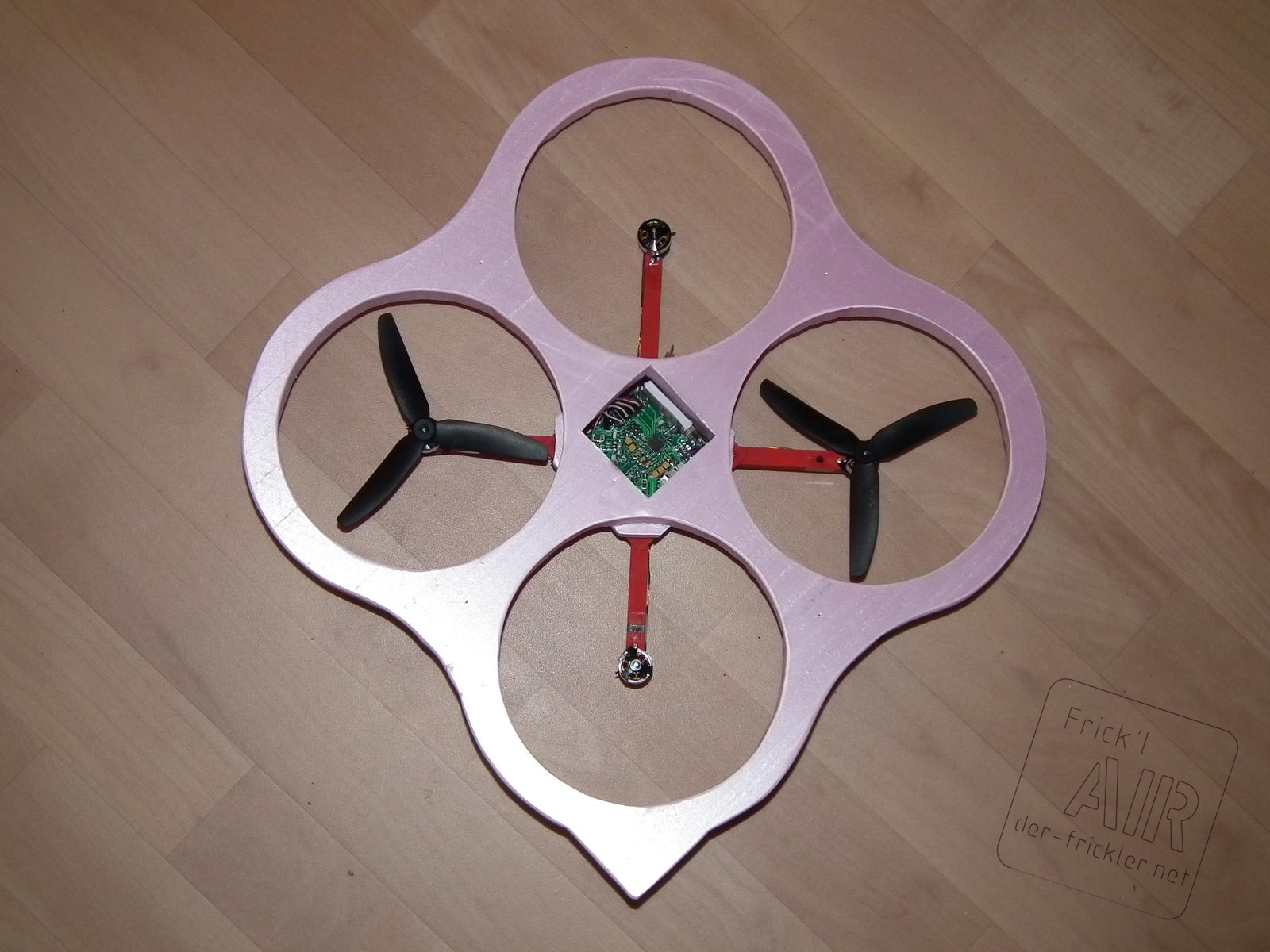
v1
Mechanik: Der Rahmen besteht aus 0,5mm Platinenmaterial, die Ausleger aus 10x10mm Kiefer.
Elektronik: Mein Quattro wird mittels einer KKMulticontroller Platine gesteuert. Die leeren SMD Platinen habe ich für $5 bei Peter in Australien bestellt, waren in sagenhaften 3 Tage da! Darauf kommen dann Bauteile für ca 6€ sowie die Teile aus 3HK 401B Gyros. Christian hat eine Schöne Anleitung für die Platinen geschrieben und bietet auf Anfrage auch leere oder halbfertige Platinen an.
Käfig Der Käfig zum Schutz der Props (und der Wohnung) besteht aus einer 20mm Hartschaumplatte (Praktiker) die mittels heißem Draht geschnitten wurde. Befestigt wird der ganze Käfig auf dem Rahmen mittels Klettband.
Erstflug Nachdem die fehlenden Props angekommen sind konnten die ersten Schwebeversuche stattfinden. Alle Potis auf Mitte und los gehts. Er steht nach trimmen sehr ruhig in der Luft und lässt sich gut steuern. Auf Yaw reagiert er recht träge was aber in kleinen Räumen kein großes Problem darstellt. Im Schwebeflug zieht er laut Messgerät ca 3A wobei der 3S610 Akku trotzdem recht warm wird - seltsam. Ich vermute das durch die 4 Regler hier starke Stromspitzen auftreten die das Messgerät nicht misst. Werde mal versuchen ein paar dicke Kondensatoren zum stabilisieren einzulöten, da die kleinen 6A Regler kaum Kondensatoren besitzen.
Langzeiterfahrung Nach etlichen Akkus macht der kleine noch immer richtig Spass, für Draußen ist er zwar nicht so doll, aber im Haus machts einfach Fun. Durch den Rahmen geht auch beim Kontakt mit Möbeln/Türen/Wänden nix kaputt und es kann einfach weiter geflogen werden.
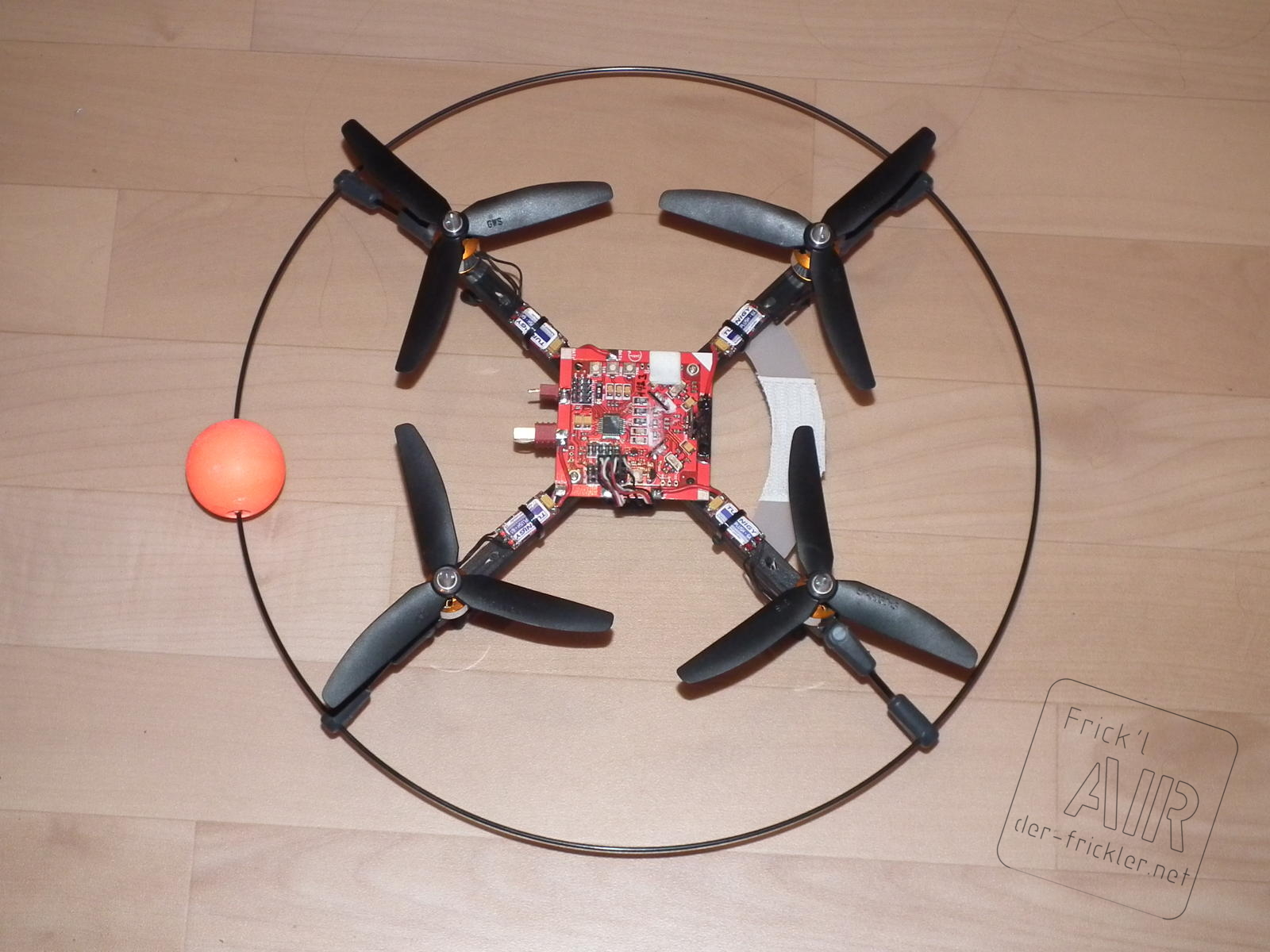
v2.5
KK Mini Quattro v 2.5 Neue Saison, neues Upgrade. Weil die Motoren und deren Befestigung an meinen alten, kleinen Quattro immer rumzickten und ich beim Aufräumen noch 4 A1510 Motoren gefunden habe gibts wurde der kleine Quad fix umgebaut. Nun ja, Umgebaut is gut, im Prinzip ist alles neu, nur die 4 Regler wurden übernommen. Rahmen wieder aus 10er Kiefer, aber nochmal kleiner, KK Plus Platine, Plush 6 Regler und eben die A1510 Motoren von DealExtreme. Wiegt dann zusammen mit dem 3S460 so 180g. Außen kommt jetzt noch n Ring aus CFK drum um auch wieder gut Indoor fliegen zu können.
Das ganze ist extrem schnell gebaut, 2 Hölzer schneiden, in der Mitte ausklinken, mit Seku verkleben, fertig ist der Rahmen. Löscher für die Motoren Bohren, Lack rauf, Motoren anschrauben, KK-Platine gedämpft aufschrauben, Regler und Akku anlöten, fertig. Locker an einem Abend zu schaffen.
Nachdem er Indoor scho nsehr gut flog durfte er am Sonntag das erste mal raus. Der Wind machte dem Ding wenig aus, nur die Lageerkennung war trotz Neon-Styrokugel hinten einfach bei ein paar Metern problematisch. Mit 2S fliegt er gut, könnte aber was mehr Dampf haben, mit 3S isses fast zuviel, beim Sinkflug muss man mit dem Gas soweit runter das die Motoren fast stehen, werde wohl mal die 5×3 2-Blatt versuchen.
Gerade die 2-Blatt getestet, von der Leistung her besser kontrollierbar, allerdings sind die HK Props echt schrottig, vibriert alles viel mehr… Mit Cam und 3S800 is er jetzt so schwer das die 3S wieder recht gut passen - zumindest was ich hier auf 20qm beurteilen kann.
So, hab ihn ein wenig aus getrickst, er war ja auf Gas zu empfindlich, also hab ich in der FB den Gaskanal auf das maximum was geht hochgedreht (Servoweg125% und Servomitte noch etwas höher), dann habe ich mit diesem maximalen Gasweg die Regler ein gelernt. Dann Gas wieder auf 80% runter und schon fliegt er viel besser - warum? - na weil die Regler jetzt mehr Weg kennen als die KK je liefern wird. So ist die Regelung am Knüppel deutlich unempfindlicher und auch die Gyros überreagieren nicht so, etwas umständlich aber wenns hilft….
Gestern wurde das kleine AIO Paket mal auf dem Mini-Quattro getestet. Erst mal auf Sicht das das Bilder der Cam in Bille und Monitor sehr dunkel war - seltsam denn die Aufnahme des Groundrec. ist OK und der Monitor hing sogar hinter dem Rekorder….
Der Quad fliegt jetzt mit 3S recht gut und trägt Cam und Co auch locker an 3S.
OSD und GPS funktionieren, allerdings gibt es da noch einiges einzustellen. Ich hatte beim GPS debugen im Code einiges auskommentiert, wie z.B. Homearrow etc.. das muss natürlich wieder rein! Dann stört momentan noch das er bei unter 10km/h auf die MAX Ansicht wechselt - beim Copter suboptimal, kann aber auch eingestellt werden. Wir arbeiten dran… Super ist die GPS backup Batterie. Fix is Fix da 
Danke an die Kaldis fürs Filmen und viel Spass gestern!
So, V2.5 wurde soeben verkauft.
Fotos:
V1







V2.5








Videos:
Links:
- KK Platine:
Ich garantiere bei meinen Bauberichten und Teilelisten keine Vollständigkeit etc...es wird aus den Teilen gebastelt die gerade herumliegen.
Bitte keine Anfragen zum Bau/Fräsen von Frames, Teilen oder sonstigen Aufträgen. Ich betreibe die Seite rein als Hobby und nutze die zur Verfügung stehende Zeit gerne für meine eigenen Projekte.
Bei einigen Projekten werde ich zu gegebener Zeit die Pläne veröffentlichen - aber auch hier lasse ich mich ungern hetzten ;-)
No waranties for completeness of any contructions, part lists etc.. I build from party i have just lying around in my workshop.
Please, No requests to buy frames, builds, etc.. I run this page in my spare-time and as hobby only. Want to keep my free time to work on my own projects - sorry
I will release the plans for some build at some point in time, but again, please don't ask for unreleased plans, i don't want to get rushed ;-)
Seiten-Werkzeuge
