Seitenleiste
Triceratops
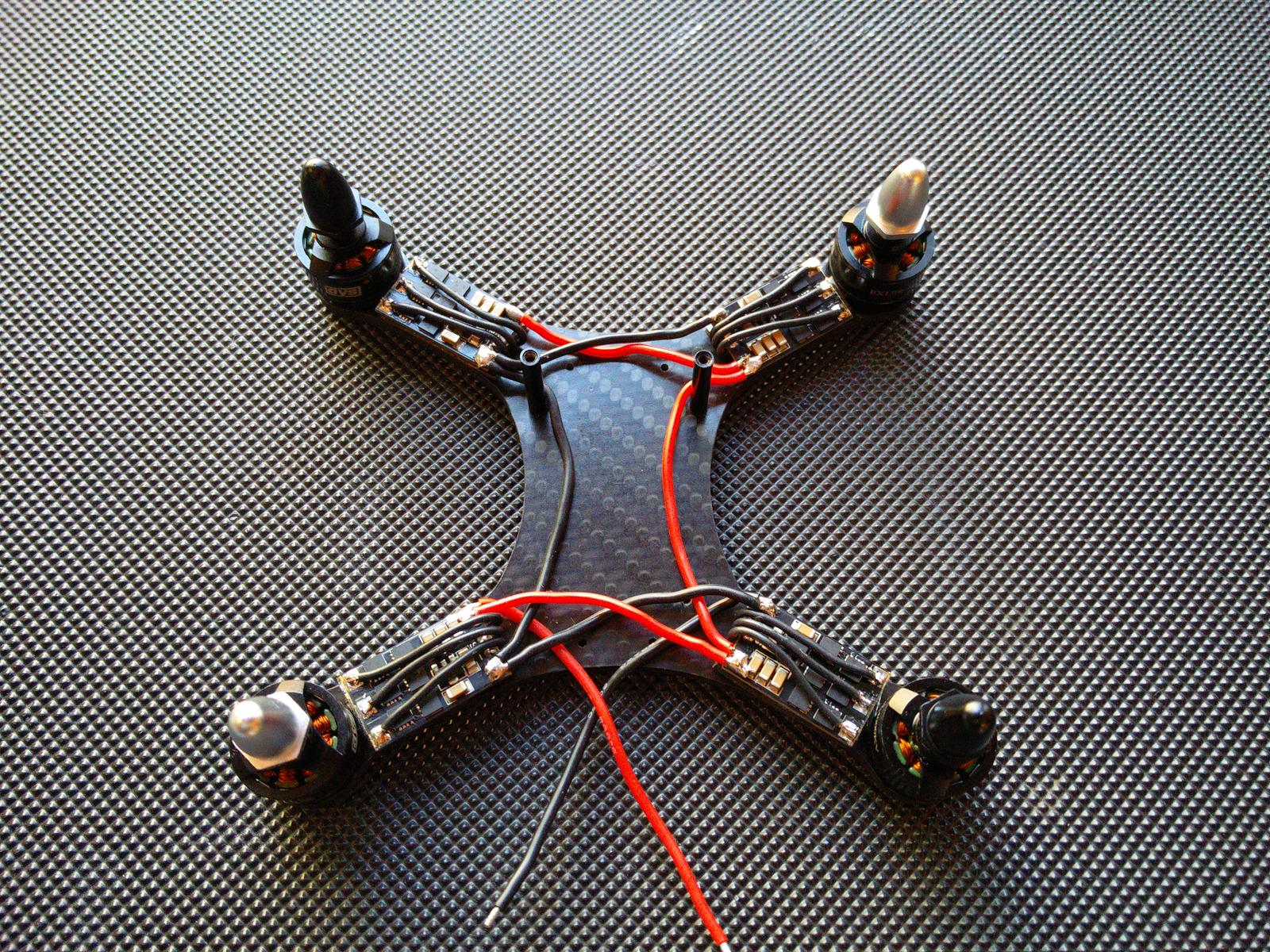
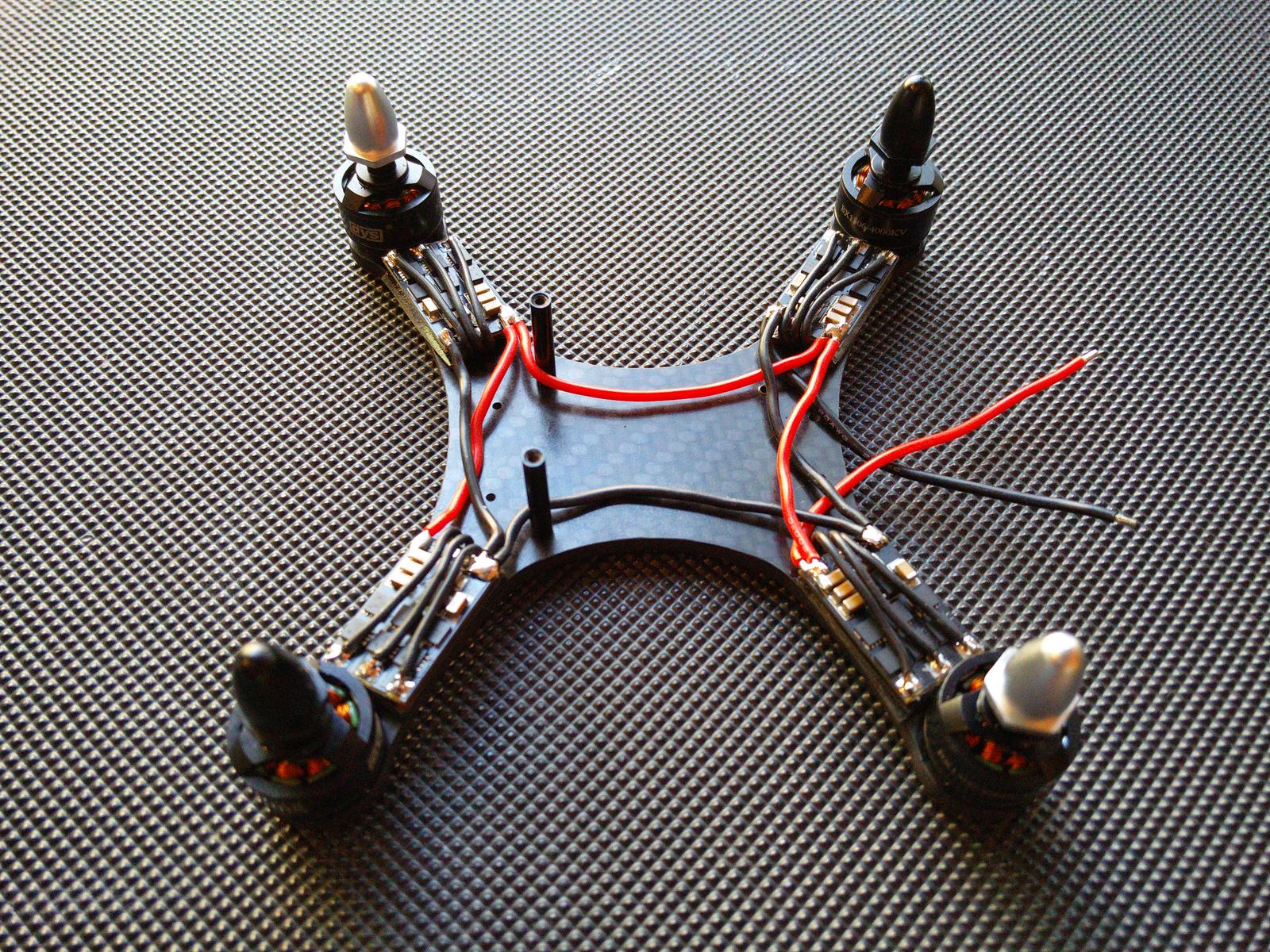
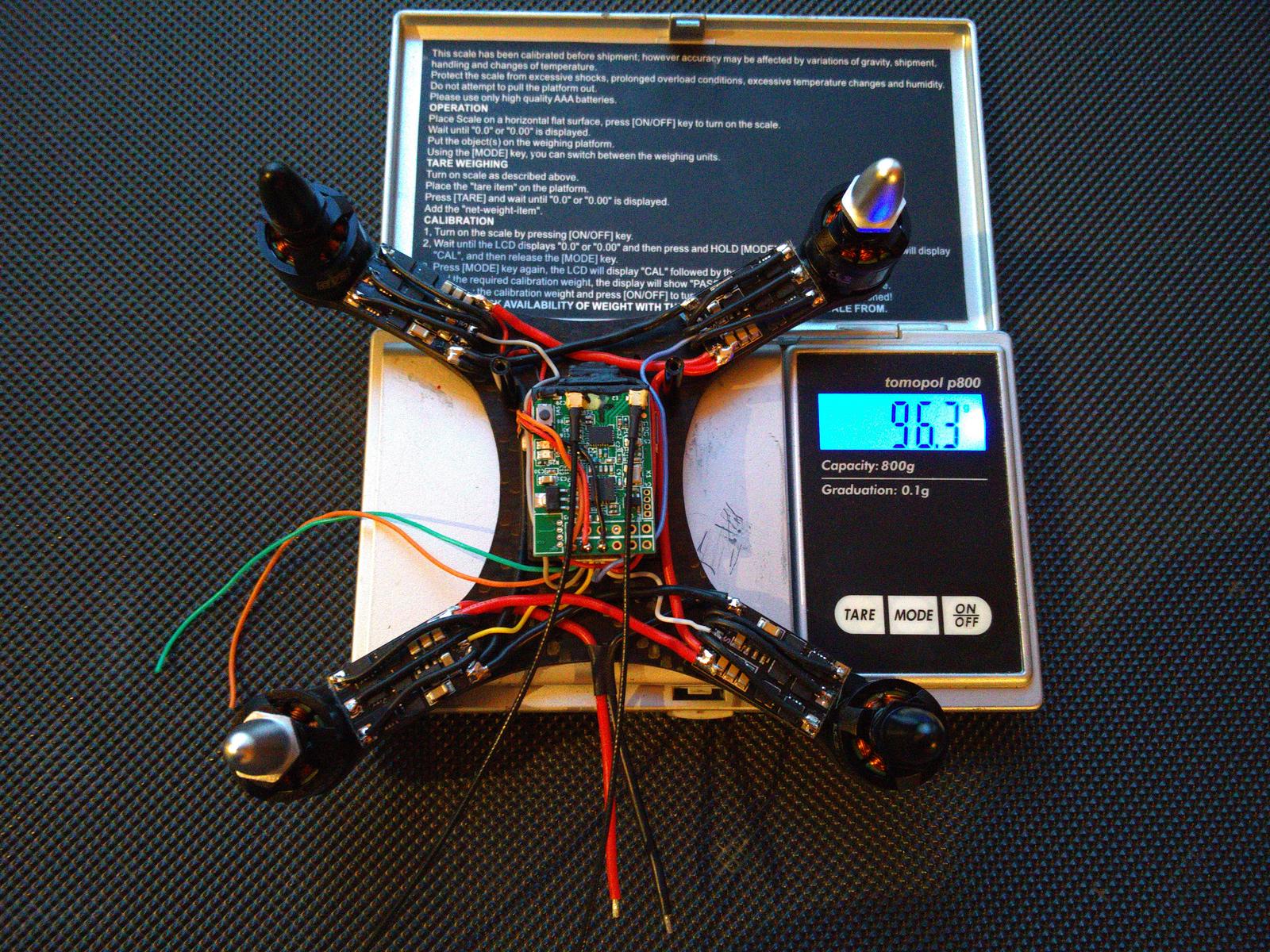
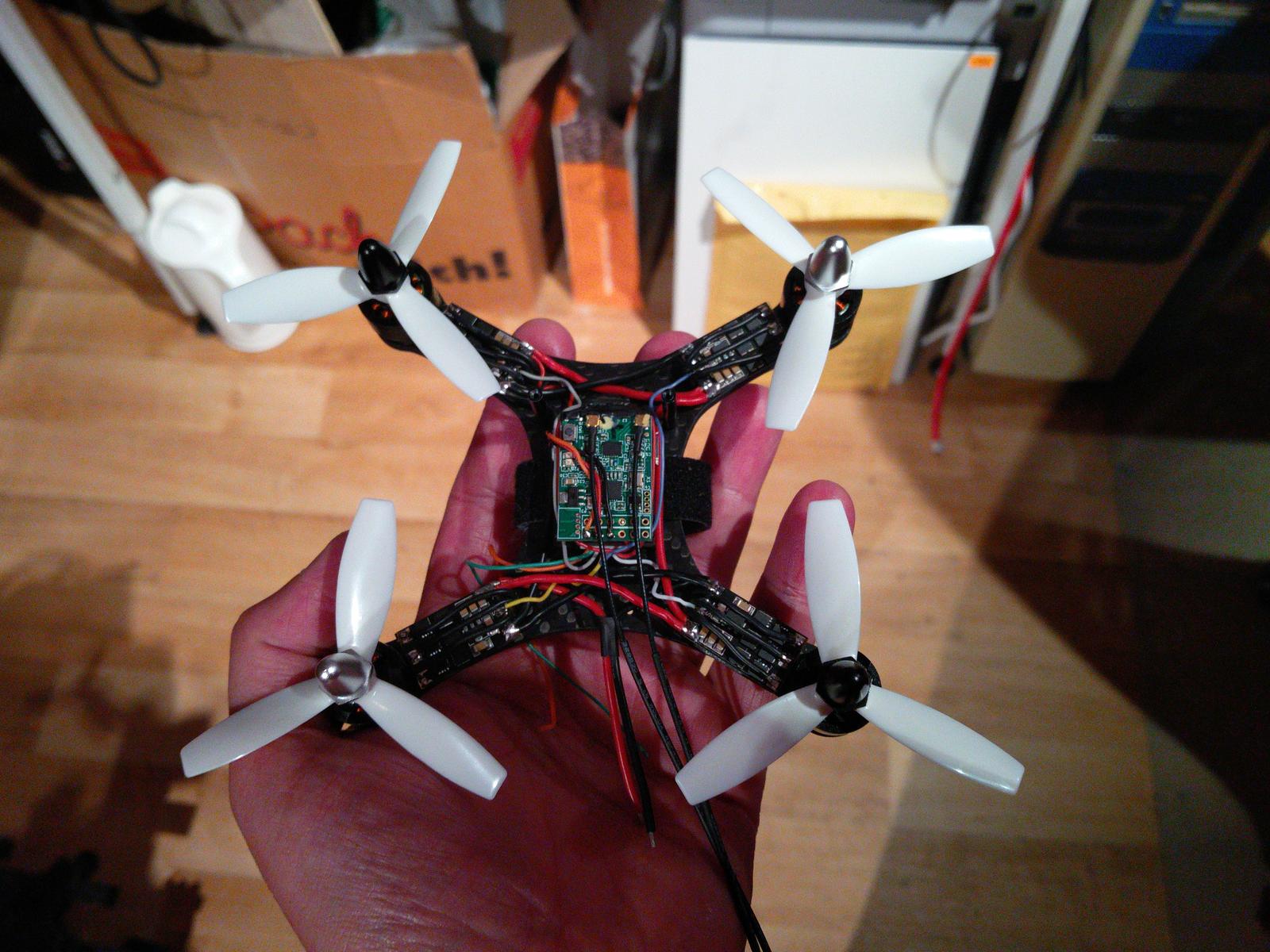
The 130mm 3inch 3blade quad with 1306 motors on 3S
|
|
|
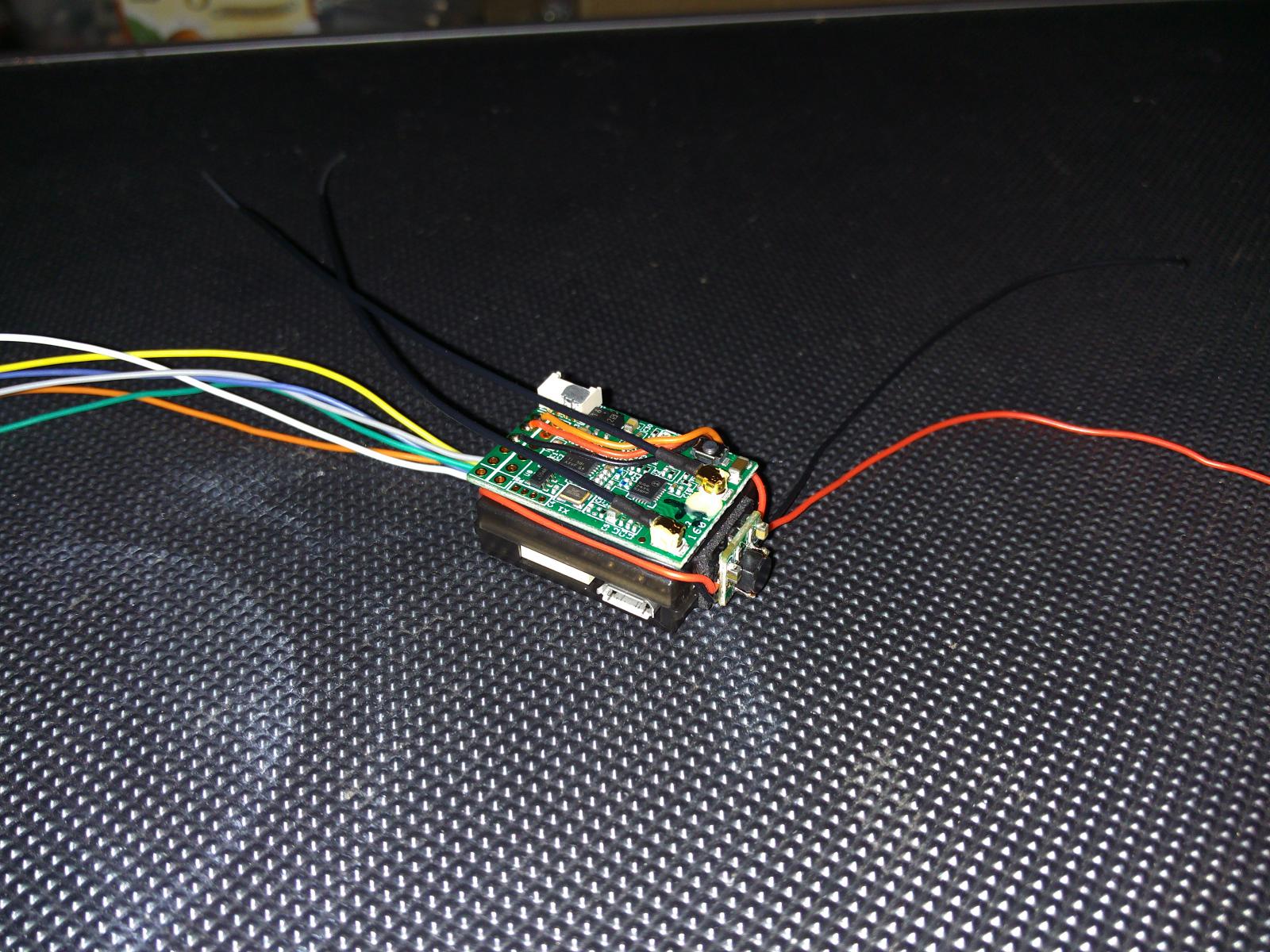
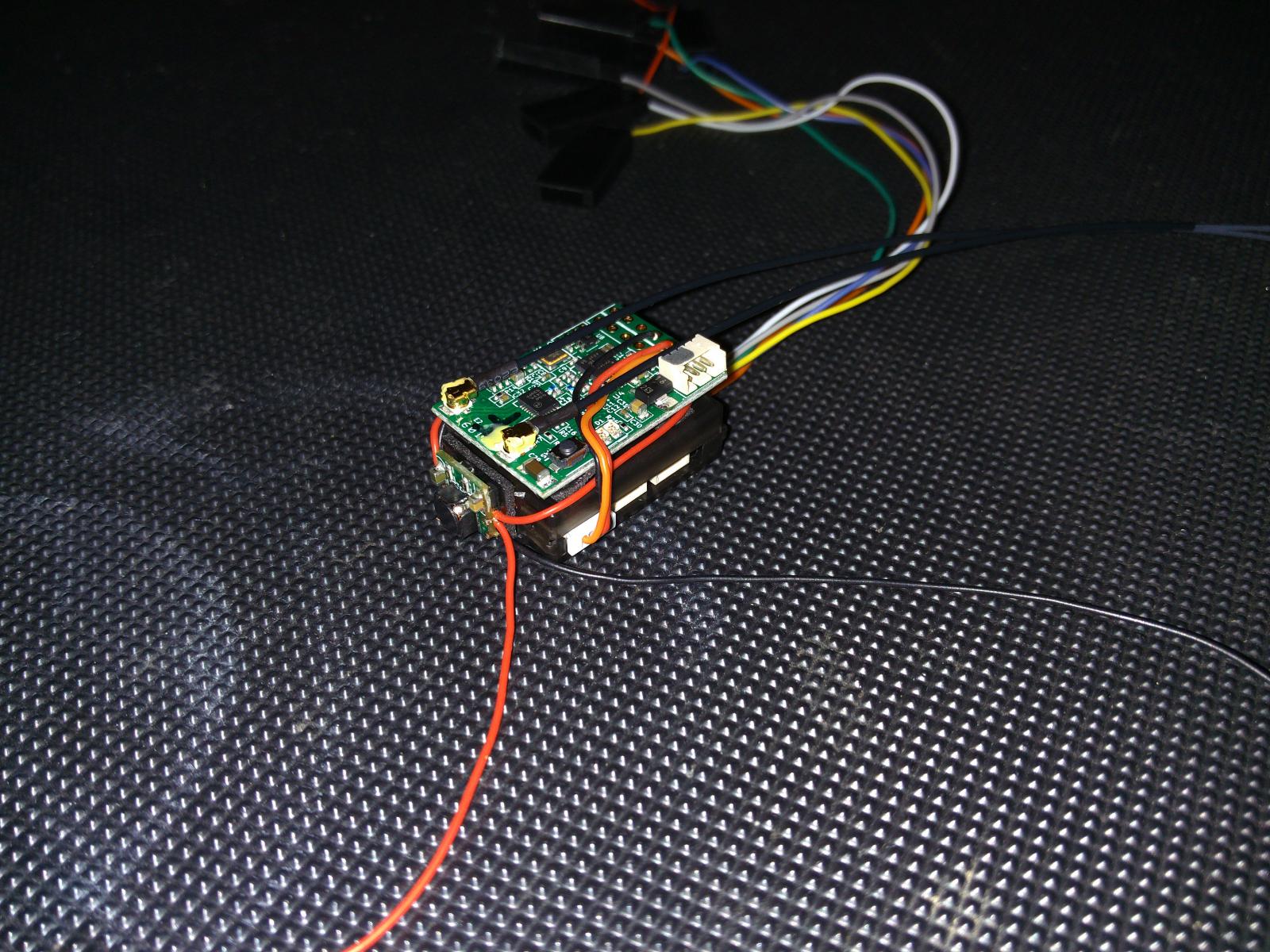
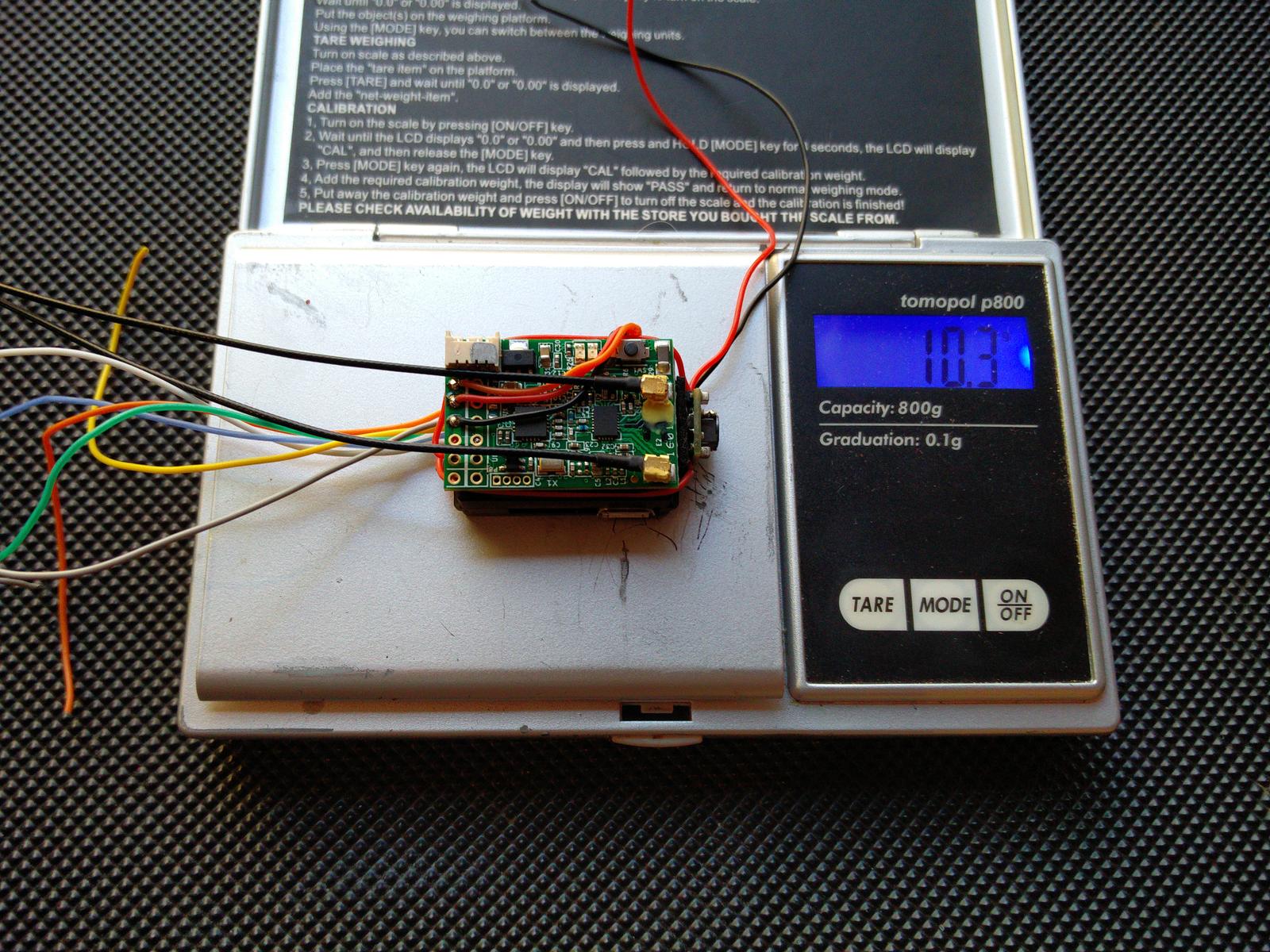
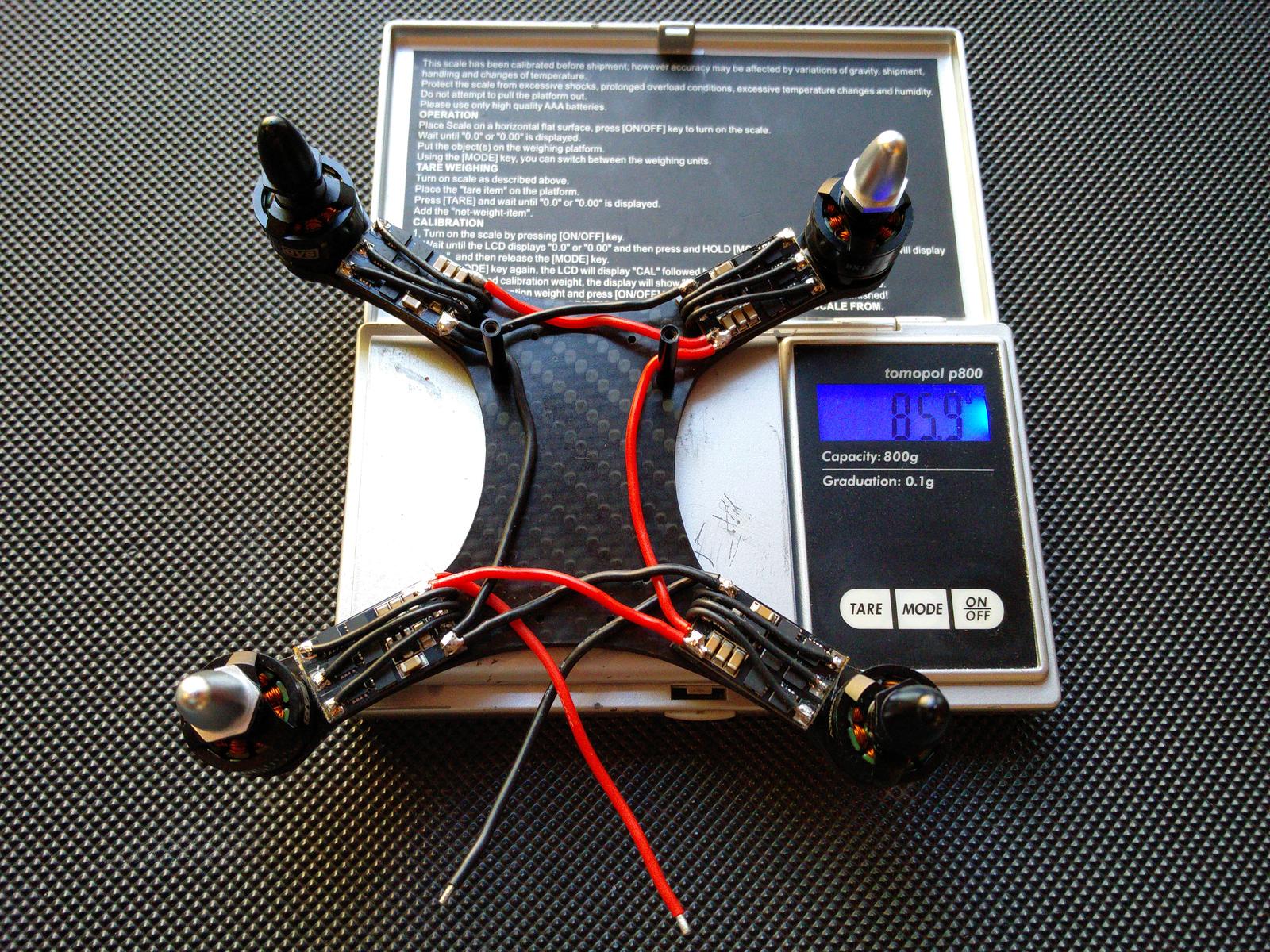
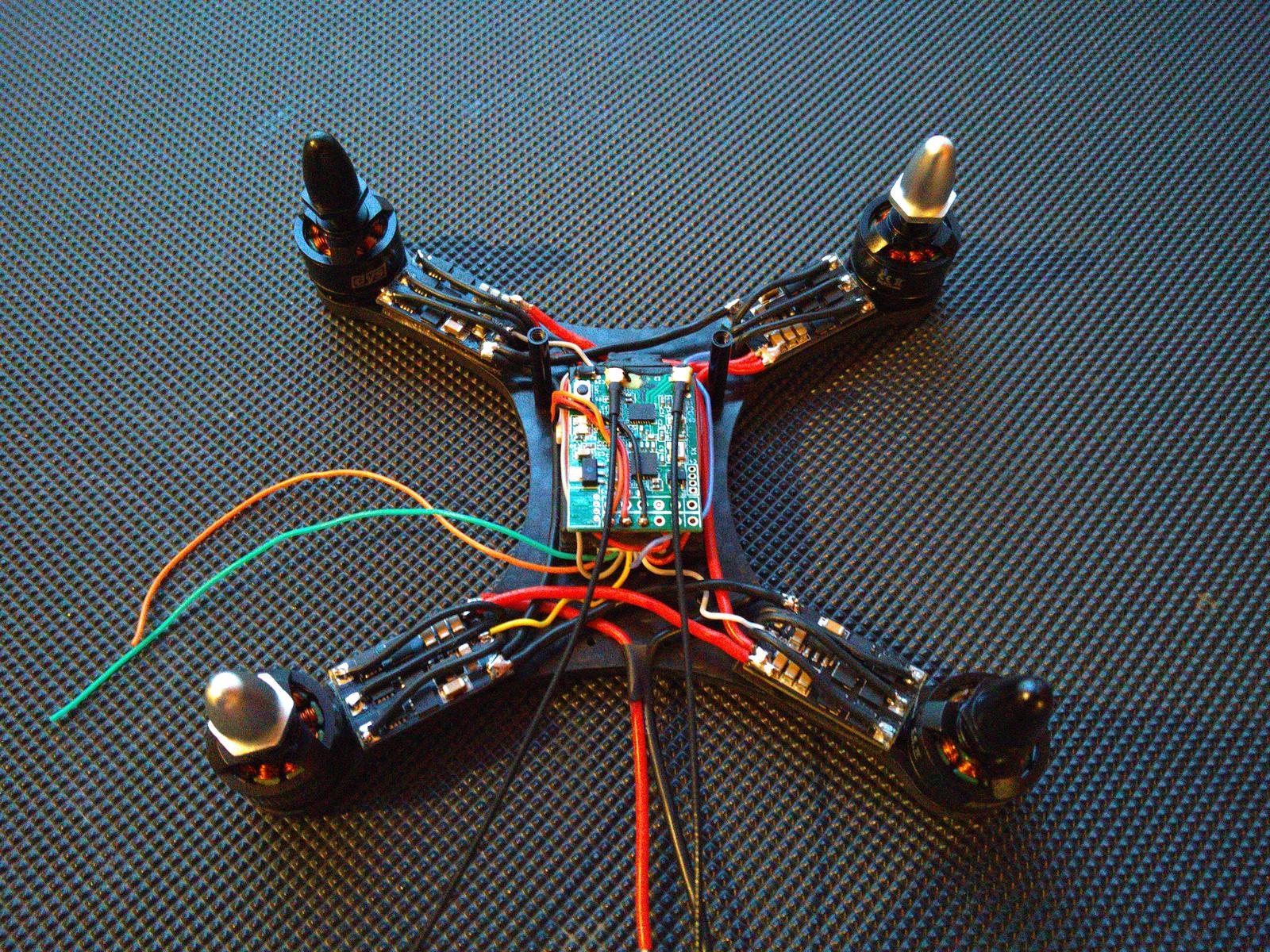
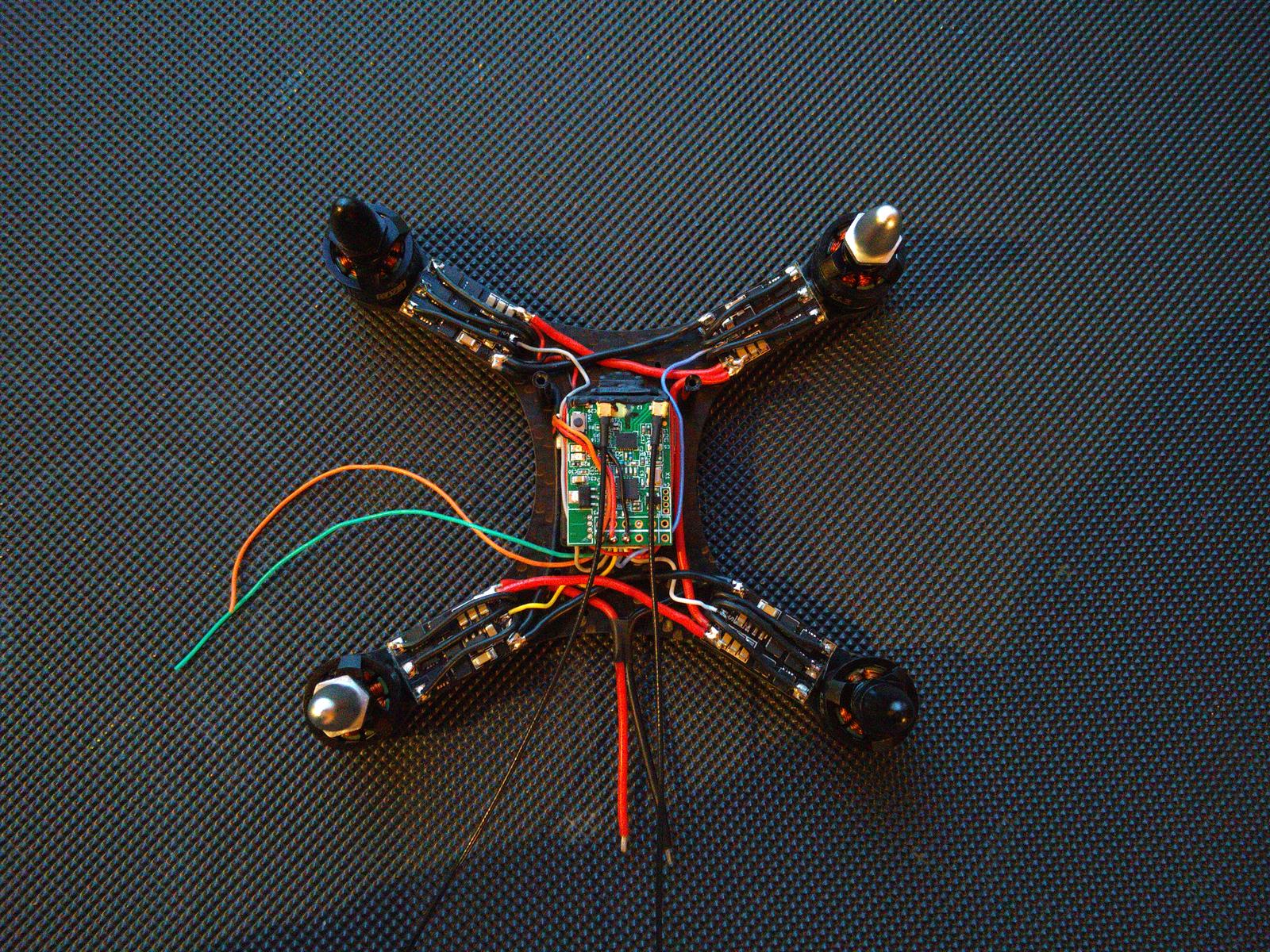
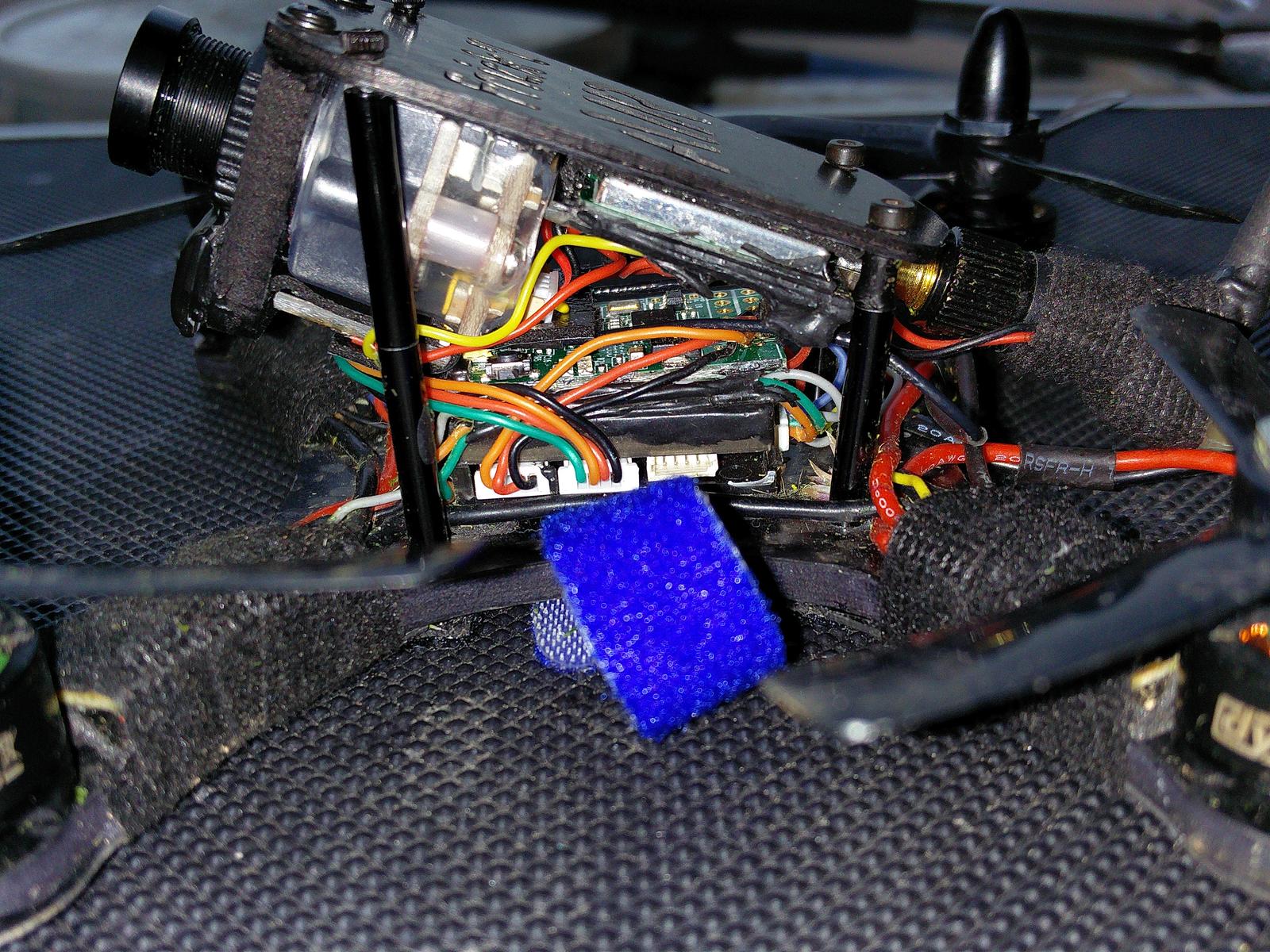
After building and flying my latest Minimalist with Raceflight and Multishot, i wanted to try that fly-on-rails feeling on a smaller platform. As i really like the DYS 1306 i gave the new and faster 4000kv a try. Together with the new 3„ 3-Blade Props popping up, that should give a powerful small platform. Frame design was adapted from my former Afro170 and Afro125 builds, but keeping it symetric this time. Cam had to go up to get out of the way and give a god cam angle.
First flights look very promising! Lots of power. Need to replace the cam by a better one.RotorX Props brake very easy, will try the new and cheaper DYS 3030 soon.
Pics:



















Links:
Settings:
Flight controller info, identifier: RCFL, version: 16.4.24
Running firmware released on: Apr 25 2016 02:55:25
# set Current settings: emf_avoidance = OFF mid_rc = 1500 min_check = 1100 max_check = 1900 rssi_channel = 0 rssi_scale = 30 rssi_ppm_invert = OFF input_filtering_mode = OFF rc_smoothing = ON roll_yaw_cam_mix_degrees = 0 min_throttle = 1170 max_throttle = 1850 min_command = 1000 servo_center_pulse = 1500 3d_deadband_low = 1406 3d_deadband_high = 1514 3d_neutral = 1460 3d_deadband_throttle = 50 enable_fast_pwm = OFF motor_pwm_rate = 16000 servo_pwm_rate = 50 disarm_kill_switch = ON auto_disarm_delay = 5 small_angle = 25 fixedwing_althold_dir = 1 reboot_character = 82 gps_provider = NMEA gps_sbas_mode = AUTO gps_auto_config = ON gps_auto_baud = OFF gps_pos_p = 15 gps_pos_i = 0 gps_pos_d = 0 gps_posr_p = 34 gps_posr_i = 14 gps_posr_d = 53 gps_nav_p = 25 gps_nav_i = 33 gps_nav_d = 83 gps_wp_radius = 200 nav_controls_heading = ON nav_speed_min = 100 nav_speed_max = 300 nav_slew_rate = 30 gtune_loP_rll = 10 gtune_loP_ptch = 10 gtune_loP_yw = 10 gtune_hiP_rll = 100 gtune_hiP_ptch = 100 gtune_hiP_yw = 100 gtune_pwr = 0 gtune_settle_time = 450 gtune_average_cycles = 16 serialrx_provider = SBUS spektrum_sat_bind = 0 telemetry_switch = OFF telemetry_inversion = OFF frsky_default_lattitude = 0.000 frsky_default_longitude = 0.000 frsky_coordinates_format = 0 frsky_unit = IMPERIAL frsky_vfas_precision = 0 hott_alarm_sound_interval = 5 battery_capacity = 0 vbat_scale = 110 vbat_max_cell_voltage = 43 vbat_min_cell_voltage = 33 vbat_warning_cell_voltage = 35 current_meter_scale = 400 current_meter_offset = 0 multiwii_current_meter_output = OFF current_meter_type = ADC align_gyro = DEFAULT align_acc = DEFAULT align_mag = DEFAULT align_board_roll = 0 align_board_pitch = 0 align_board_yaw = 0 max_angle_inclination = 700 rf_loop_ctrl = H8 moron_threshold = 16 imu_dcm_kp = 2500 imu_dcm_ki = 0 alt_hold_deadband = 40 alt_hold_fast_change = ON deadband = 0 yaw_deadband = 0 throttle_correction_value = 0 throttle_correction_angle = 800 yaw_control_direction = 1 yaw_motor_direction = 1 yaw_jump_prevention_limit = 200 tri_unarmed_servo = ON servo_lowpass_freq = 400 servo_lowpass_enable = OFF default_rate_profile = 0 rc_rate = 100 rc_expo = 70 rc_yaw_expo = 40 thr_mid = 50 thr_expo = 0 roll_rate = 65 pitch_rate = 65 yaw_rate = 50 tpa_rate = 0 tpa_breakpoint = 1500 acro_plus_factor = 20 giant_green_catfish = 20 failsafe_delay = 10 failsafe_off_delay = 10 failsafe_throttle = 1000 failsafe_kill_switch = OFF failsafe_throttle_low_delay = 100 rx_min_usec = 885 rx_max_usec = 2115 max_aux_channels = 99 gimbal_mode = NORMAL acc_hardware = 0 acc_lpf_hz = 20 accxy_deadband = 40 accz_deadband = 40 accz_lpf_cutoff = 5.000 acc_unarmedcal = ON acc_trim_pitch = 0 acc_trim_roll = 0 baro_tab_size = 21 baro_noise_lpf = 0.600 baro_cf_vel = 0.985 baro_cf_alt = 0.965 baro_hardware = 1 mag_hardware = 1 mag_declination = 0 pid_controller = LUX p_pitch = 65 i_pitch = 100 d_pitch = 22 p_roll = 55 i_roll = 80 d_roll = 18 p_yaw = 110 i_yaw = 180 d_yaw = 0 p_pitchf = 6.500 i_pitchf = 1.500 d_pitchf = 0.130 p_rollf = 5.000 i_rollf = 0.950 d_rollf = 0.100 p_yawf = 10.000 i_yawf = 1.750 d_yawf = 0.000 level_horizon = 3.000 level_angle = 3.000 sensitivity_horizon = 100 p_alt = 50 i_alt = 0 d_alt = 0 p_level = 55 i_level = 55 d_level = 100 p_vel = 120 i_vel = 45 d_vel = 1 gyro_lpf_hz = 80 dterm_lpf_hz = 80 yaw_pterm_cut_hz = 30 blackbox_rate_num = 1 blackbox_rate_denom = 1 blackbox_device = SPIFLASH beeper_off_flags = 0 magzero_x = 0 magzero_y = 0 magzero_z = 0
Ich garantiere bei meinen Bauberichten und Teilelisten keine Vollständigkeit etc...es wird aus den Teilen gebastelt die gerade herumliegen.
Bitte keine Anfragen zum Bau/Fräsen von Frames, Teilen oder sonstigen Aufträgen. Ich betreibe die Seite rein als Hobby und nutze die zur Verfügung stehende Zeit gerne für meine eigenen Projekte.
Bei einigen Projekten werde ich zu gegebener Zeit die Pläne veröffentlichen - aber auch hier lasse ich mich ungern hetzten ;-)
No waranties for completeness of any contructions, part lists etc.. I build from party i have just lying around in my workshop.
Please, No requests to buy frames, builds, etc.. I run this page in my spare-time and as hobby only. Want to keep my free time to work on my own projects - sorry
I will release the plans for some build at some point in time, but again, please don't ask for unreleased plans, i don't want to get rushed ;-)
Seiten-Werkzeuge
