
Benutzer-Werkzeuge
Seitenleiste
Inhaltsverzeichnis
u250 Pocket - 2021 LR-Update
|
|
|
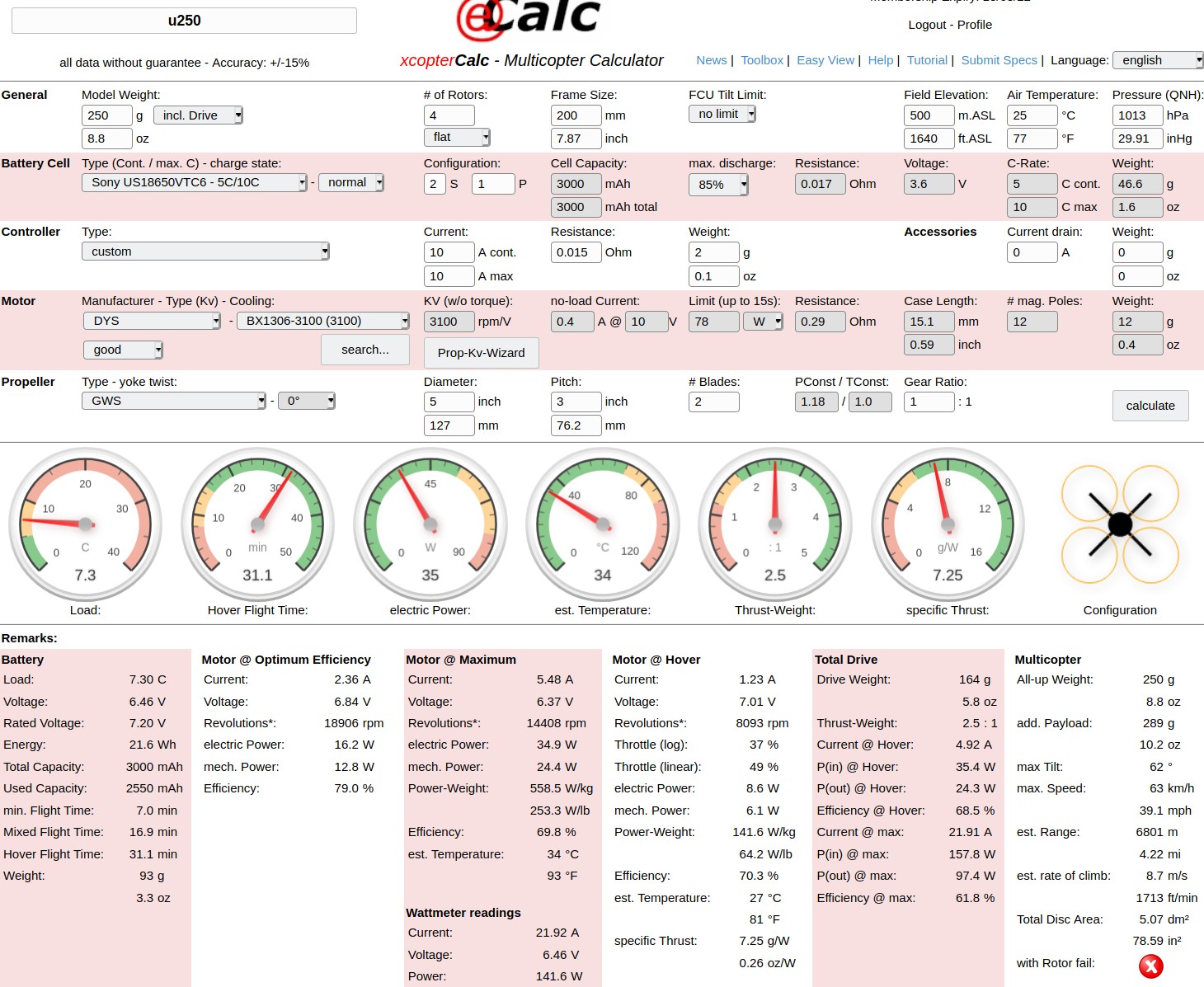
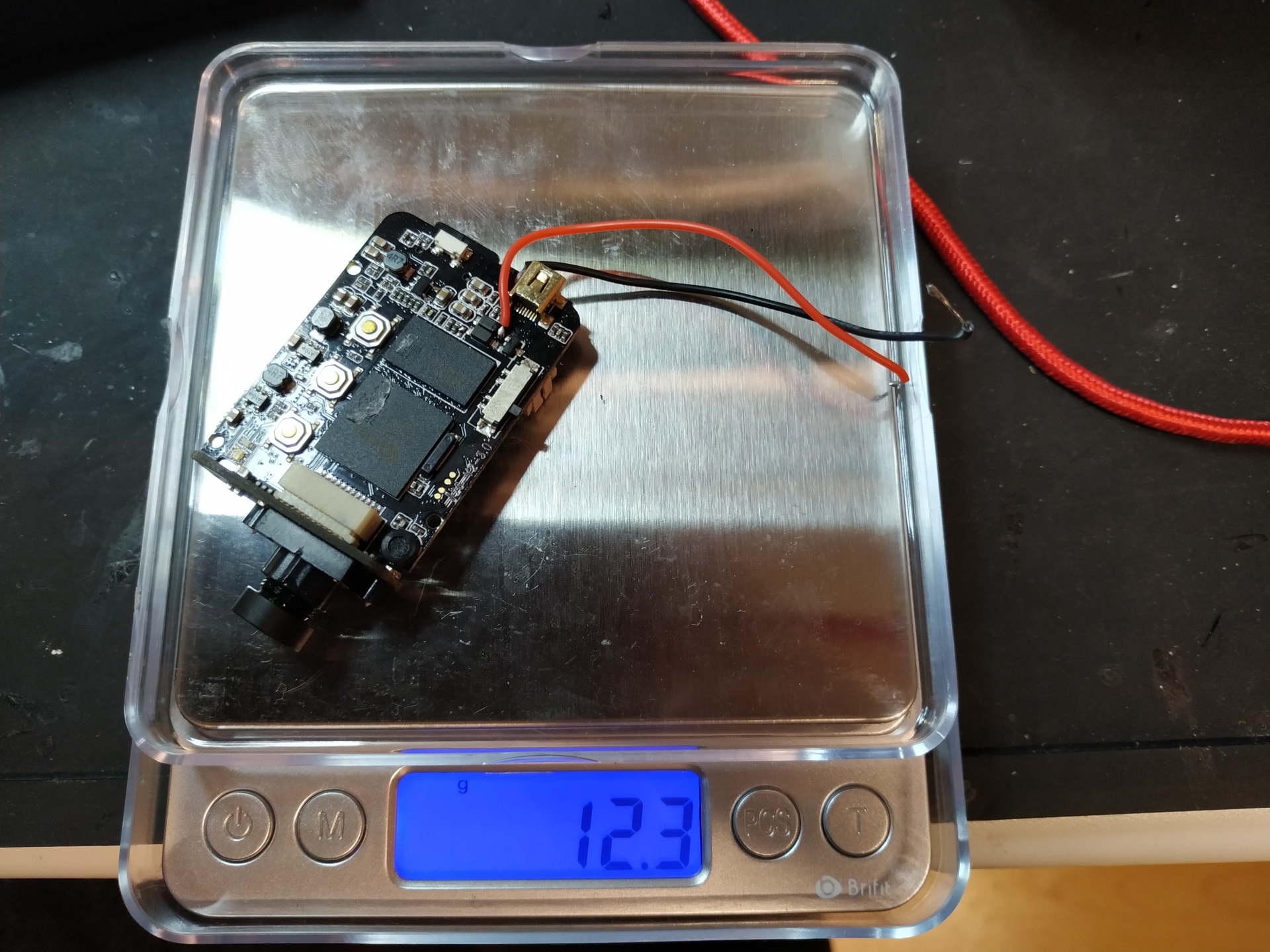
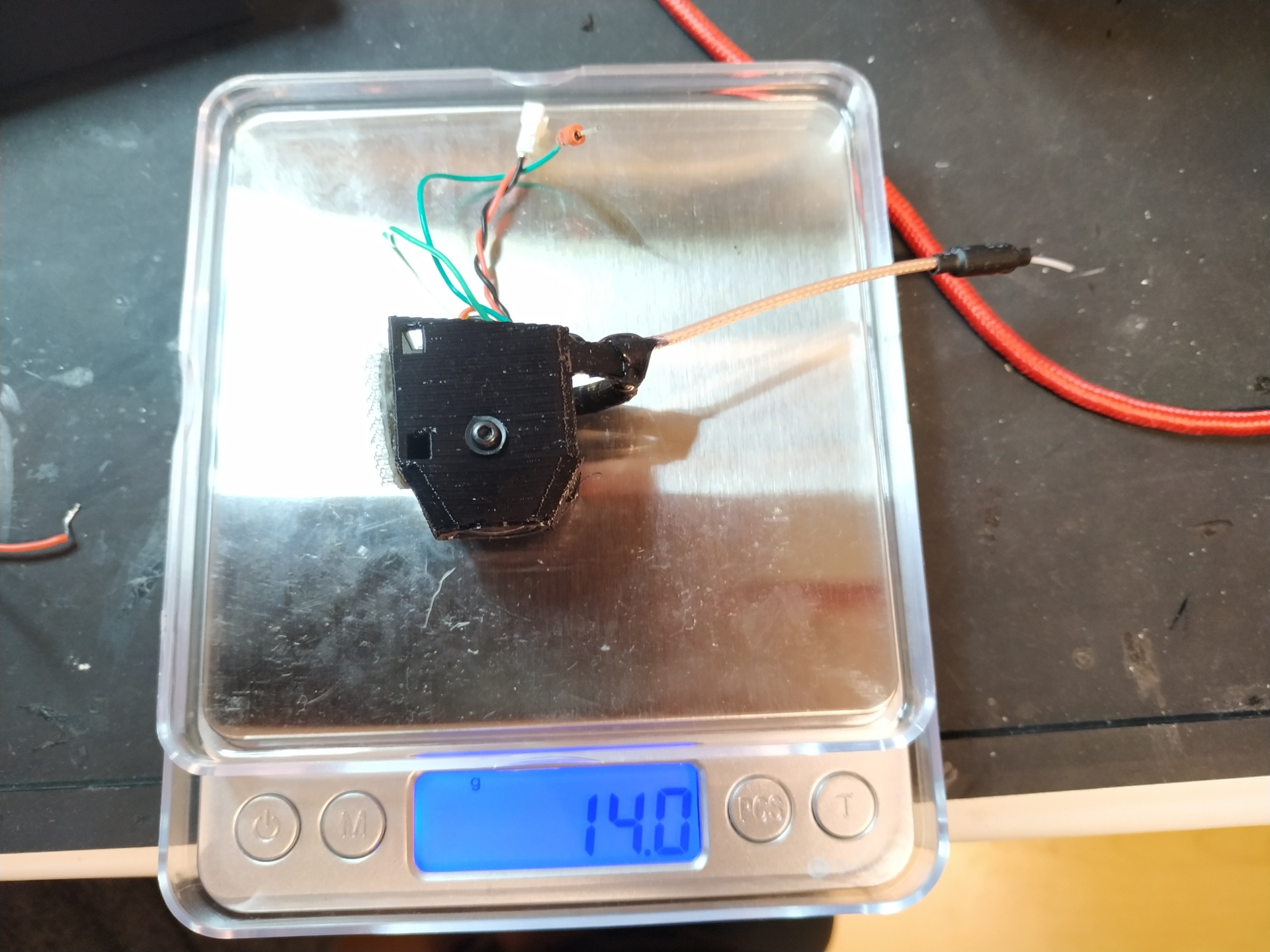
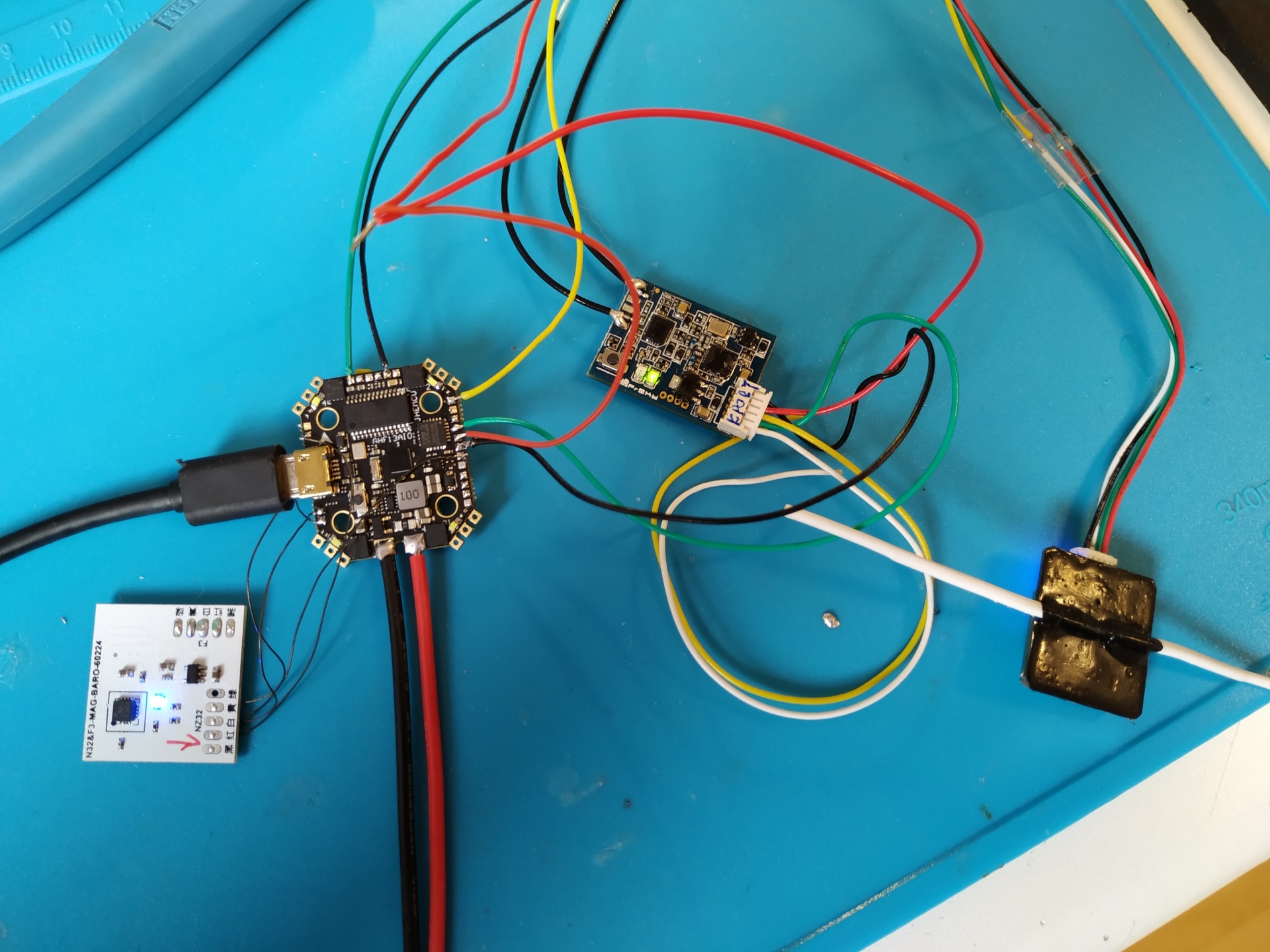
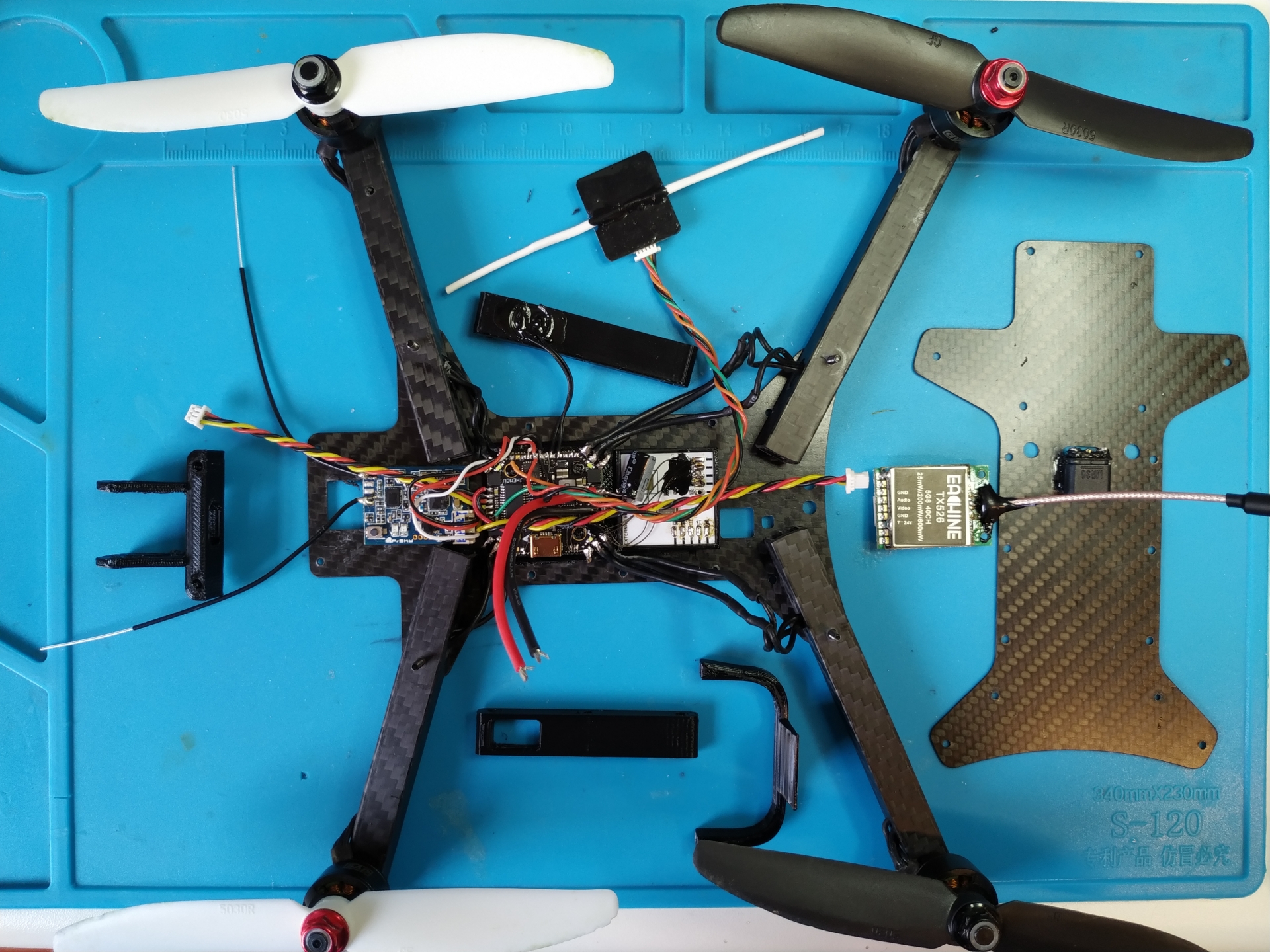
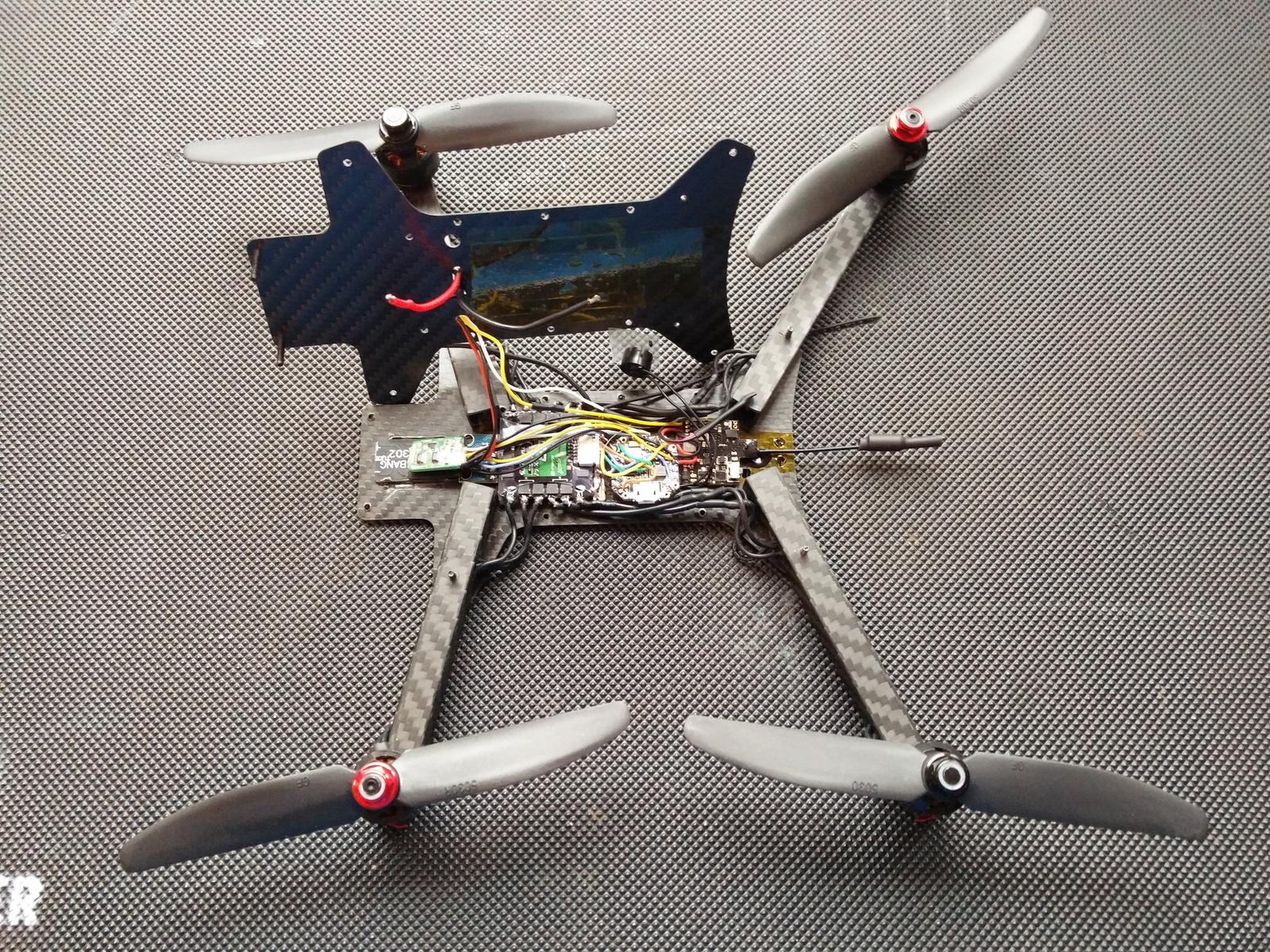
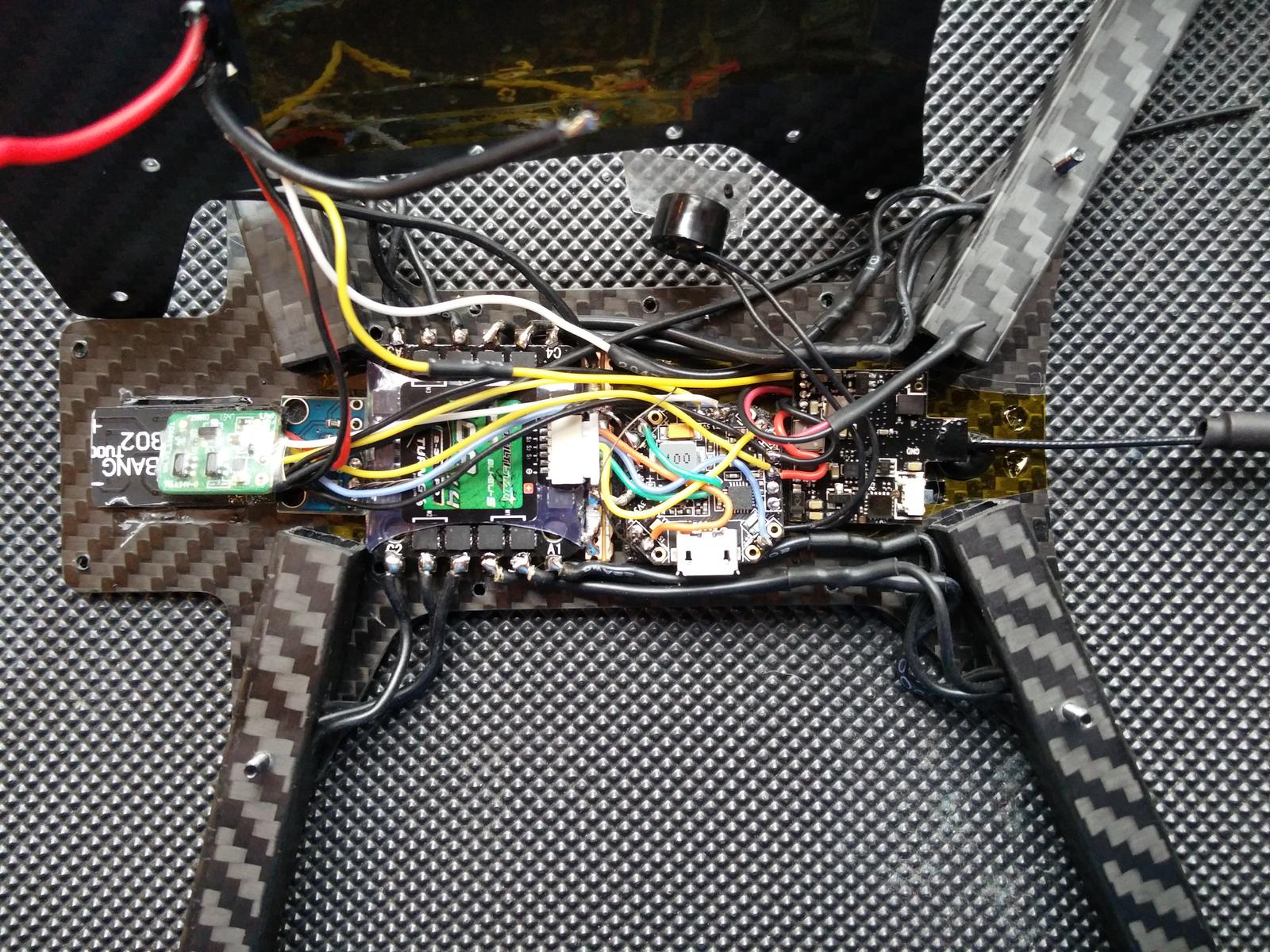
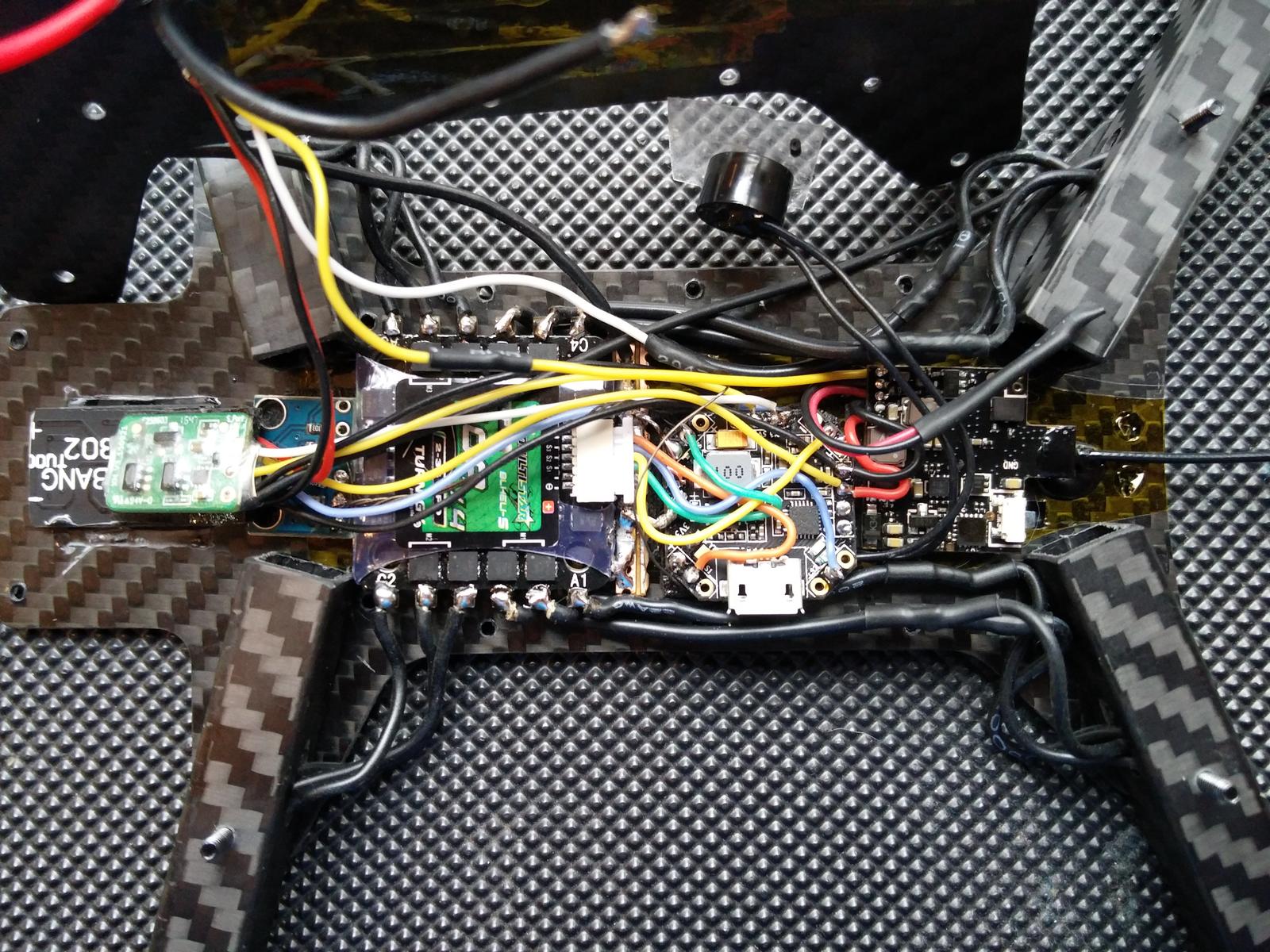
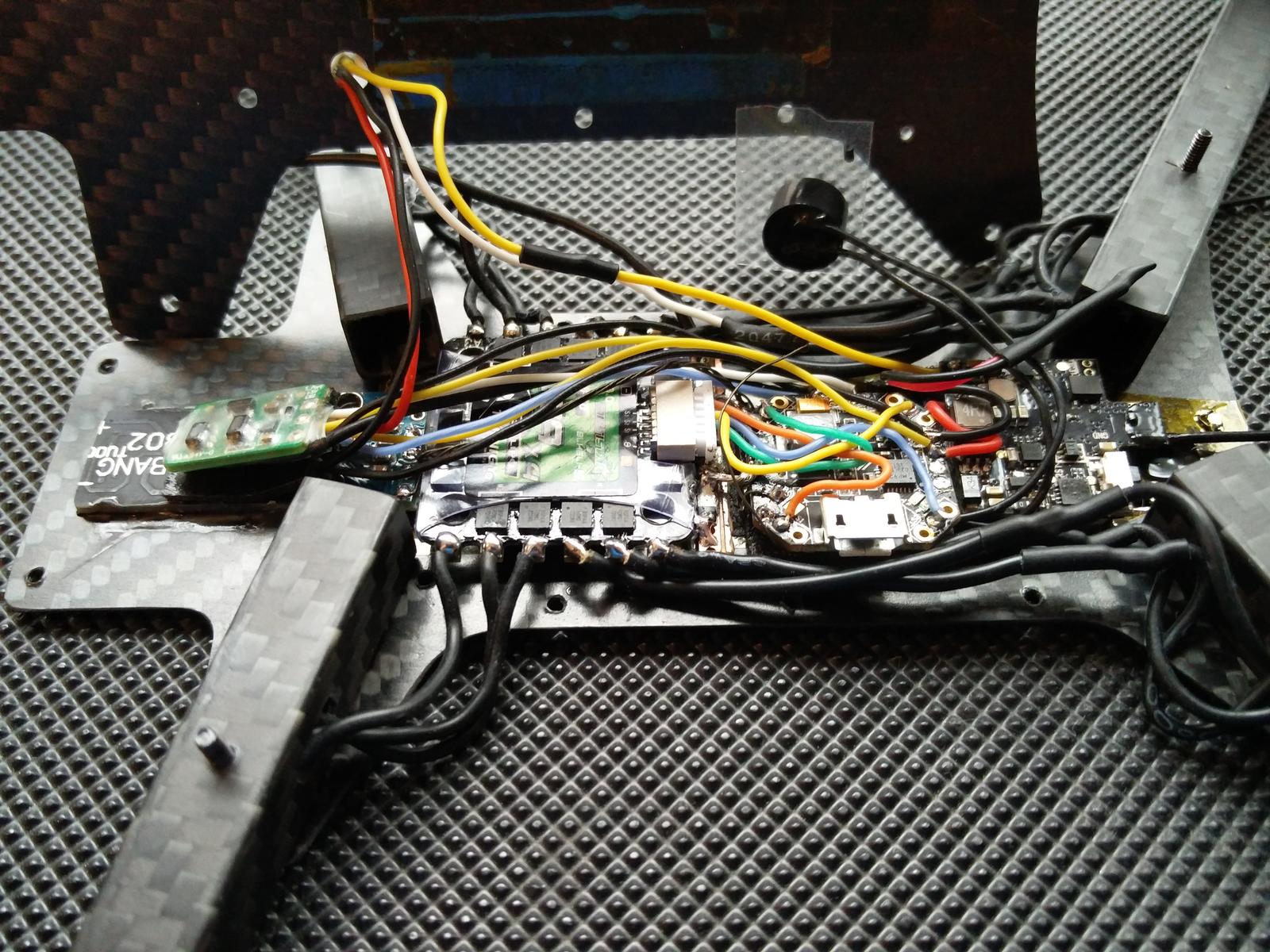
Pics:





Settings
set report_cell_voltage = ON save
U250 Pocket
|
|
|
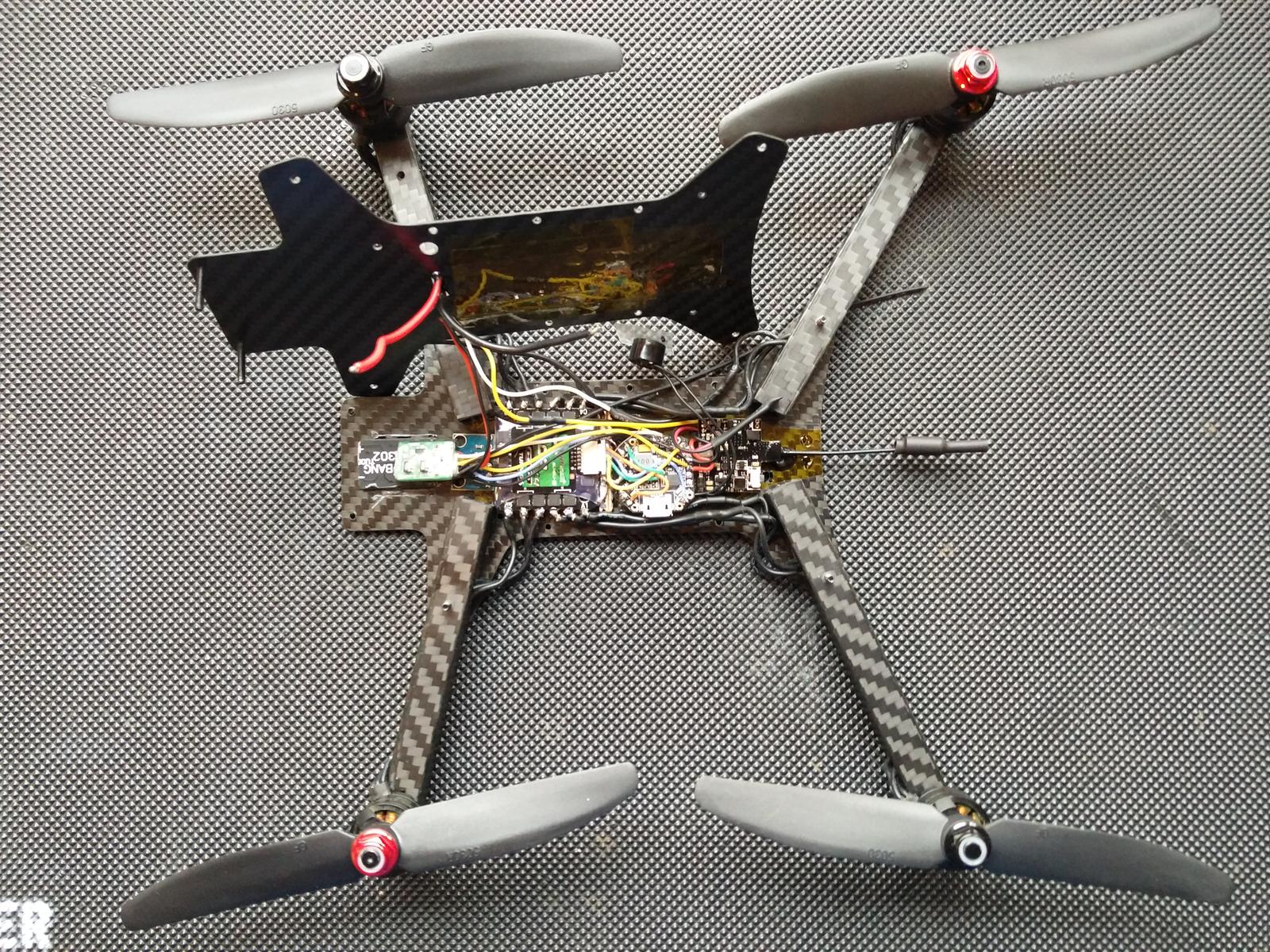
Be Prepared… It seems that some new flight regulations are coming up in Germany which has less regulations when flying below 250g models.
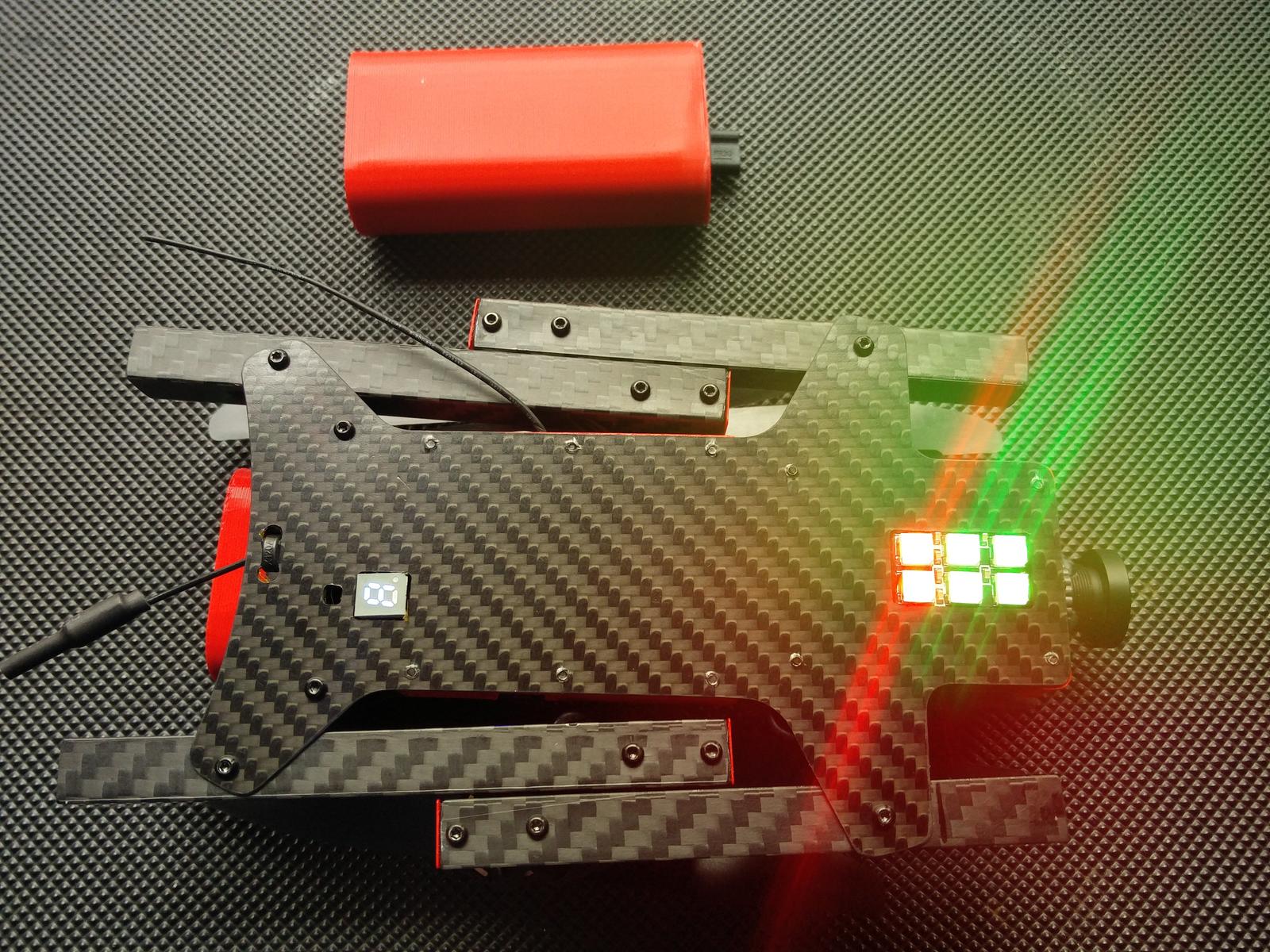
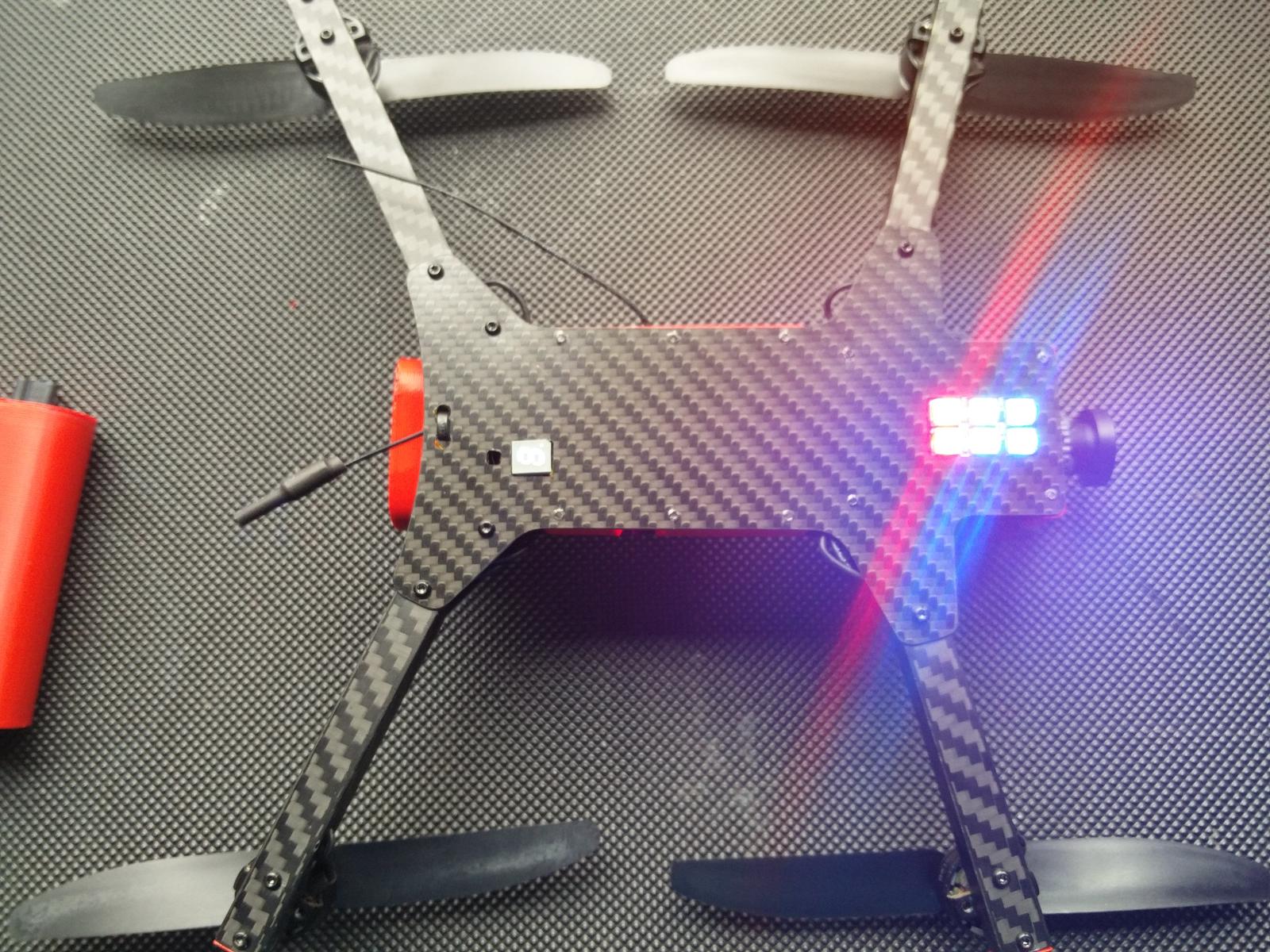
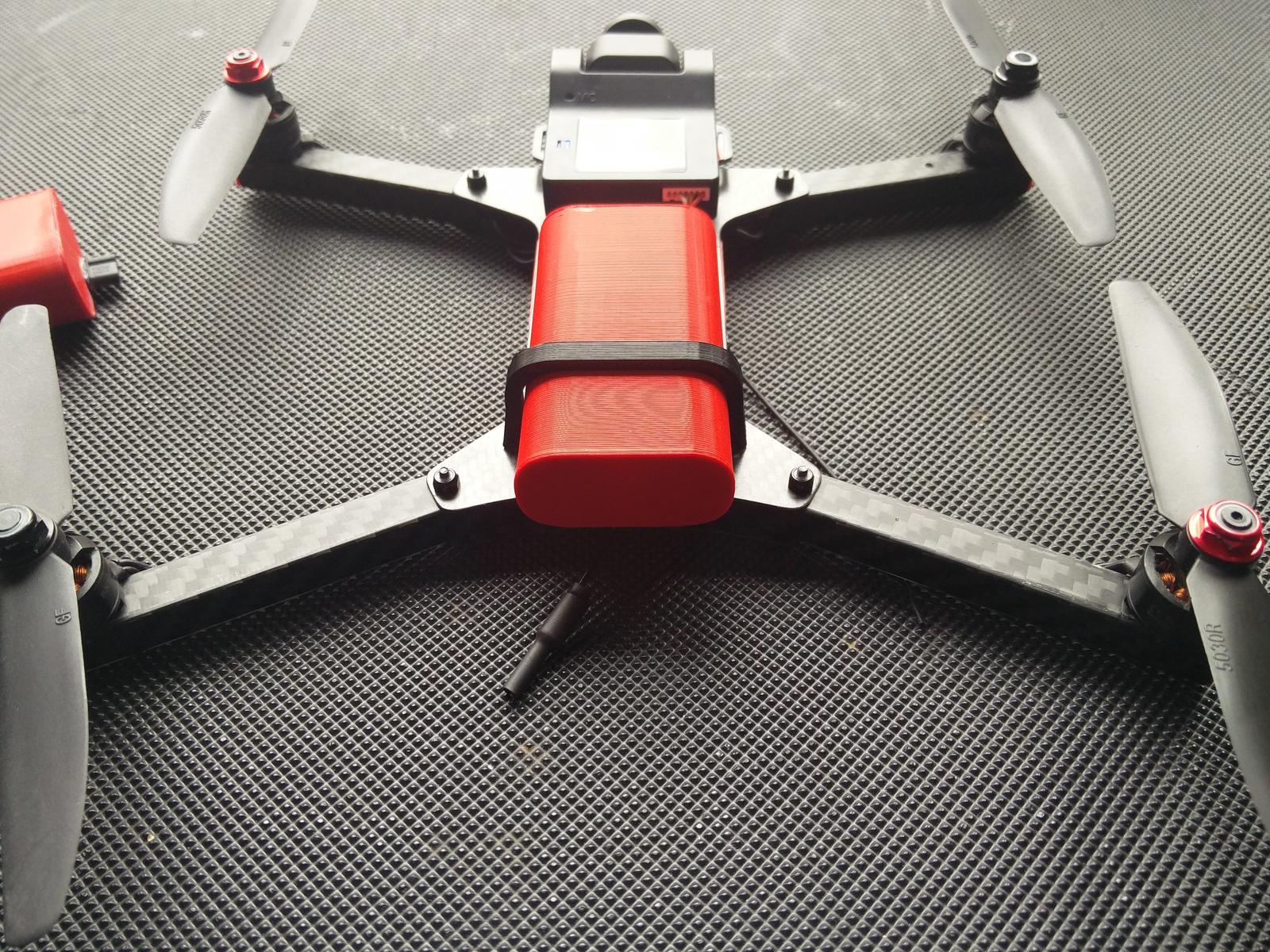
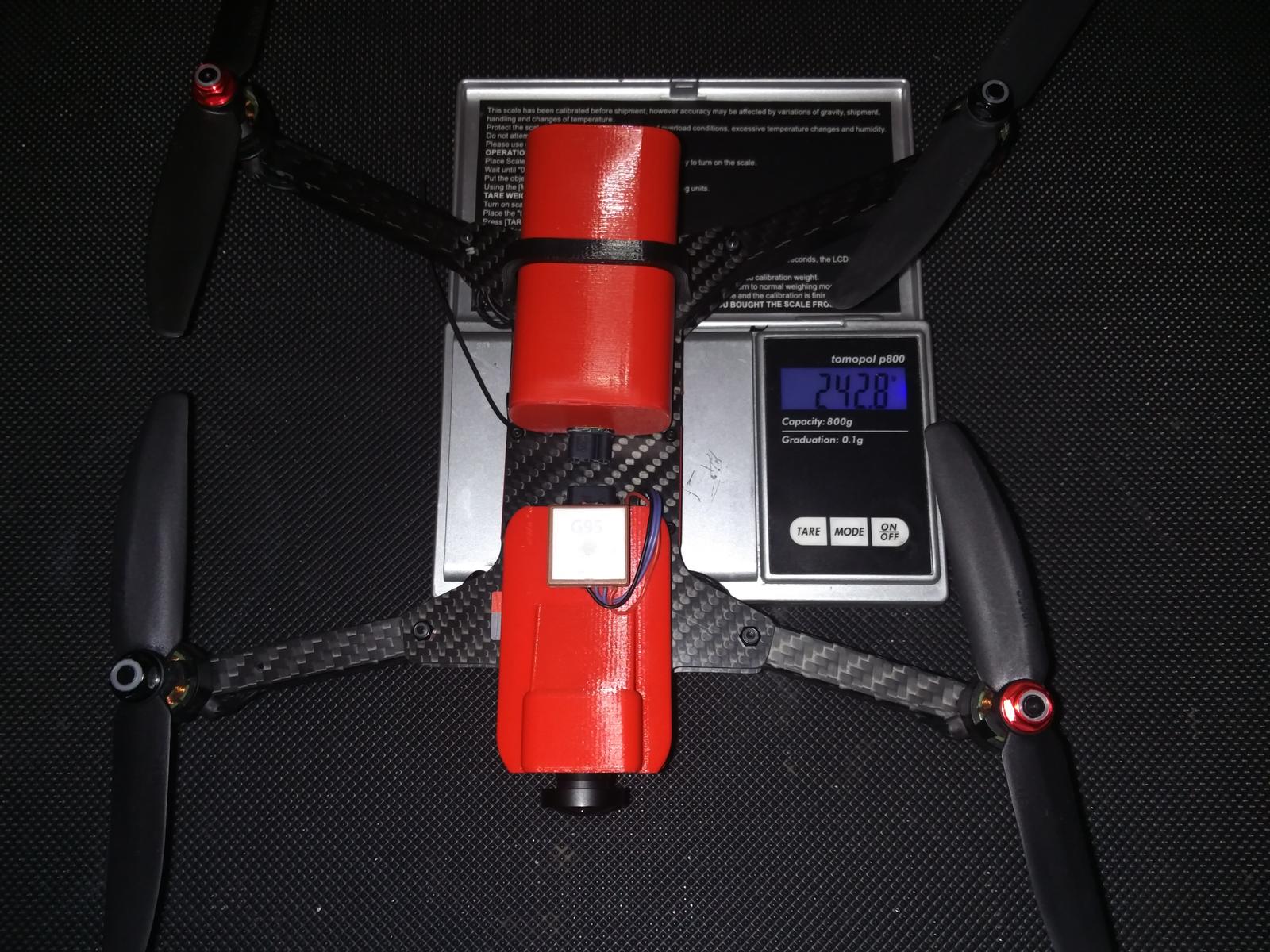
Well, challenge accepted! Lets build a small and foldable Quad with an HD Cam that can fly for quite a while. 1306 Motors were harvested from the old leFlunder Quad and i finally found a usage for the 18650 cells i had lying around. This time i printed some parts of the frame and battery tray to get a bit more experience in 3d design.
Pics:


















Links:
Settings:
# dump # version # INAV/SPRACINGF3EVO 1.5.1 Jan 5 2017 / 11:34:25 (556168d) # pflags # Persistent config flags: 0x00000000 # dump master # mixer mixer QUADX mmix reset smix reset # feature feature -RX_PPM feature -VBAT feature -UNUSED_1 feature -RX_SERIAL feature -MOTOR_STOP feature -SERVO_TILT feature -SOFTSERIAL feature -GPS feature -FAILSAFE feature -SONAR feature -TELEMETRY feature -CURRENT_METER feature -3D feature -RX_PARALLEL_PWM feature -RX_MSP feature -RSSI_ADC feature -LED_STRIP feature -DASHBOARD feature -UNUSED_2 feature -BLACKBOX feature -CHANNEL_FORWARDING feature -TRANSPONDER feature -AIRMODE feature -SUPEREXPO feature -VTX feature -RX_SPI feature -SOFTSPI feature -PWM_SERVO_DRIVER feature -PWM_OUTPUT_ENABLE feature -OSD feature VBAT feature RX_SERIAL feature SERVO_TILT feature GPS feature FAILSAFE feature LED_STRIP feature PWM_OUTPUT_ENABLE # beeper beeper GYRO_CALIBRATED beeper HW_FAILURE beeper RX_LOST beeper RX_LOST_LANDING beeper DISARMING beeper ARMING beeper ARMING_GPS_FIX beeper BAT_CRIT_LOW beeper BAT_LOW beeper GPS_STATUS beeper RX_SET beeper ACC_CALIBRATION beeper ACC_CALIBRATION_FAIL beeper READY_BEEP beeper MULTI_BEEPS beeper DISARM_REPEAT beeper ARMED beeper SYSTEM_INIT beeper ON_USB beeper LAUNCH_MODE # map map AETR1234 # serial serial 20 1 115200 38400 0 115200 serial 0 0 115200 38400 0 115200 serial 1 2 115200 38400 0 115200 serial 2 64 115200 38400 0 115200 # led led 0 5,0::G:4 led 1 6,0::AW:4 led 2 7,0::AW:10 led 3 8,0::AW:10 led 4 9,0::AW:6 led 5 10,0::G:6 led 6 0,0::C:0 led 7 0,0::C:0 led 8 0,0::C:0 led 9 0,0::C:0 led 10 0,0::C:0 led 11 0,0::C:0 led 12 0,0::C:0 led 13 0,0::C:0 led 14 0,0::C:0 led 15 0,0::C:0 led 16 0,0::C:0 led 17 0,0::C:0 led 18 0,0::C:0 led 19 0,0::C:0 led 20 0,0::C:0 led 21 0,0::C:0 led 22 0,0::C:0 led 23 0,0::C:0 led 24 0,0::C:0 led 25 0,0::C:0 led 26 0,0::C:0 led 27 0,0::C:0 led 28 0,0::C:0 led 29 0,0::C:0 led 30 0,0::C:0 led 31 0,0::C:0 # color color 0 0,0,0 color 1 0,255,255 color 2 0,0,255 color 3 30,0,255 color 4 60,0,255 color 5 90,0,255 color 6 120,0,255 color 7 150,0,255 color 8 180,0,255 color 9 210,0,255 color 10 240,0,255 color 11 270,0,255 color 12 300,0,255 color 13 330,0,255 color 14 0,0,0 color 15 0,0,0 # mode_color mode_color 0 0 1 mode_color 0 1 11 mode_color 0 2 2 mode_color 0 3 13 mode_color 0 4 10 mode_color 0 5 3 mode_color 1 0 5 mode_color 1 1 11 mode_color 1 2 3 mode_color 1 3 13 mode_color 1 4 10 mode_color 1 5 3 mode_color 2 0 10 mode_color 2 1 11 mode_color 2 2 4 mode_color 2 3 13 mode_color 2 4 10 mode_color 2 5 3 mode_color 3 0 8 mode_color 3 1 11 mode_color 3 2 4 mode_color 3 3 13 mode_color 3 4 10 mode_color 3 5 3 mode_color 4 0 7 mode_color 4 1 11 mode_color 4 2 3 mode_color 4 3 13 mode_color 4 4 10 mode_color 4 5 3 mode_color 5 0 9 mode_color 5 1 11 mode_color 5 2 2 mode_color 5 3 13 mode_color 5 4 10 mode_color 5 5 3 mode_color 6 0 9 mode_color 6 1 6 mode_color 6 2 1 mode_color 6 3 0 mode_color 6 4 0 mode_color 6 5 2 mode_color 6 6 3 mode_color 6 7 6 mode_color 6 8 0 mode_color 6 9 0 mode_color 6 10 0 set looptime = 2000 set i2c_overclock = OFF set gyro_sync = OFF set gyro_sync_denom = 2 set acc_task_frequency = 500 set attitude_task_frequency = 250 set async_mode = NONE set mid_rc = 1500 set min_check = 1100 set max_check = 1900 set rssi_channel = 16 set rssi_scale = 30 set rssi_ppm_invert = OFF set rc_smoothing = ON set input_filtering_mode = OFF set min_throttle = 1157 set max_throttle = 1850 set min_command = 1000 set 3d_deadband_low = 1406 set 3d_deadband_high = 1514 set 3d_neutral = 1460 set 3d_deadband_throttle = 1000 set motor_pwm_rate = 1000 set motor_pwm_protocol = ONESHOT125 set fixed_wing_auto_arm = OFF set disarm_kill_switch = ON set auto_disarm_delay = 5 set small_angle = 25 set reboot_character = 82 set gps_provider = UBLOX set gps_sbas_mode = NONE set gps_dyn_model = AIR_1G set gps_auto_config = ON set gps_auto_baud = ON set inav_auto_mag_decl = ON set inav_accz_unarmedcal = ON set inav_use_gps_velned = ON set inav_gps_delay = 200 set inav_gps_min_sats = 6 set inav_w_z_baro_p = 0.350 set inav_w_z_gps_p = 0.200 set inav_w_z_gps_v = 0.500 set inav_w_xy_gps_p = 1.000 set inav_w_xy_gps_v = 2.000 set inav_w_z_res_v = 0.500 set inav_w_xy_res_v = 0.500 set inav_w_acc_bias = 0.010 set inav_max_eph_epv = 1000.000 set inav_baro_epv = 100.000 set nav_disarm_on_landing = OFF set nav_use_midthr_for_althold = OFF set nav_extra_arming_safety = OFF set nav_user_control_mode = ATTI set nav_position_timeout = 5 set nav_wp_radius = 100 set nav_max_speed = 300 set nav_max_climb_rate = 500 set nav_manual_speed = 500 set nav_manual_climb_rate = 200 set nav_landing_speed = 200 set nav_land_slowdown_minalt = 500 set nav_land_slowdown_maxalt = 2000 set nav_emerg_landing_speed = 500 set nav_min_rth_distance = 500 set nav_rth_climb_first = ON set nav_rth_tail_first = OFF set nav_rth_alt_mode = AT_LEAST set nav_rth_altitude = 1000 set nav_mc_bank_angle = 30 set nav_mc_hover_thr = 1500 set nav_mc_auto_disarm_delay = 2000 set nav_fw_cruise_thr = 1400 set nav_fw_min_thr = 1200 set nav_fw_max_thr = 1700 set nav_fw_bank_angle = 20 set nav_fw_climb_angle = 20 set nav_fw_dive_angle = 15 set nav_fw_pitch2thr = 10 set nav_fw_roll2pitch = 75 set nav_fw_loiter_radius = 5000 set nav_fw_launch_velocity = 300 set nav_fw_launch_accel = 1863 set nav_fw_launch_detect_time = 40 set nav_fw_launch_thr = 1700 set nav_fw_launch_motor_delay = 500 set nav_fw_launch_timeout = 5000 set nav_fw_launch_climb_angle = 10 set serialrx_provider = SBUS set spektrum_sat_bind = 0 set telemetry_switch = OFF set telemetry_inversion = ON set frsky_default_lattitude = 0.000 set frsky_default_longitude = 0.000 set frsky_coordinates_format = 0 set frsky_unit = IMPERIAL set frsky_vfas_precision = 0 set frsky_vfas_cell_voltage = OFF set hott_alarm_sound_interval = 5 set smartport_uart_unidir = OFF set battery_capacity = 0 set vbat_scale = 110 set vbat_max_cell_voltage = 43 set vbat_min_cell_voltage = 31 set vbat_warning_cell_voltage = 33 set current_meter_scale = 400 set current_meter_offset = 0 set multiwii_current_meter_output = OFF set current_meter_type = ADC set align_gyro = DEFAULT set align_acc = DEFAULT set align_mag = DEFAULT set align_board_roll = 8 set align_board_pitch = -16 set align_board_yaw = 1800 set gyro_lpf = 42HZ set moron_threshold = 32 set imu_dcm_kp = 2500 set imu_dcm_ki = 50 set imu_dcm_kp_mag = 10000 set imu_dcm_ki_mag = 0 set pos_hold_deadband = 20 set alt_hold_deadband = 50 set yaw_motor_direction = 1 set yaw_jump_prevention_limit = 200 set tri_unarmed_servo = ON set servo_lowpass_freq = 400 set servo_lowpass_enable = OFF set servo_center_pulse = 1500 set servo_pwm_rate = 50 set failsafe_delay = 5 set failsafe_recovery_delay = 5 set failsafe_off_delay = 200 set failsafe_throttle = 1000 set failsafe_kill_switch = OFF set failsafe_throttle_low_delay = 100 set failsafe_procedure = SET-THR set rx_min_usec = 885 set rx_max_usec = 2115 set acc_hardware = MPU6500 set baro_use_median_filter = ON set baro_hardware = BMP280 set mag_hardware = AK8963 set blackbox_rate_num = 1 set blackbox_rate_denom = 1 set blackbox_device = SERIAL set magzero_x = -204 set magzero_y = 150 set magzero_z = 68 set acczero_x = 137 set acczero_y = 99 set acczero_z = 33 set ledstrip_visual_beeper = OFF set accgain_x = 4090 set accgain_y = 4090 set accgain_z = 4026 # rxfail rxfail 0 a rxfail 1 a rxfail 2 a rxfail 3 h rxfail 4 h rxfail 5 h rxfail 6 h rxfail 7 h rxfail 8 h rxfail 9 h rxfail 10 h rxfail 11 h rxfail 12 h rxfail 13 h rxfail 14 h rxfail 15 h rxfail 16 h rxfail 17 h # dump profile # profile profile 0 # aux aux 0 0 1 1700 2100 aux 1 1 0 900 1300 aux 2 2 0 1300 1700 aux 3 3 3 1300 2100 aux 4 9 3 1700 2100 aux 5 11 4 1700 2100 aux 6 0 0 900 900 aux 7 0 0 900 900 aux 8 0 0 900 900 aux 9 0 0 900 900 aux 10 0 0 900 900 aux 11 0 0 900 900 aux 12 0 0 900 900 aux 13 0 0 900 900 aux 14 0 0 900 900 aux 15 0 0 900 900 aux 16 0 0 900 900 aux 17 0 0 900 900 aux 18 0 0 900 900 aux 19 0 0 900 900 # adjrange adjrange 0 0 0 900 900 0 0 adjrange 1 0 0 900 900 0 0 adjrange 2 0 0 900 900 0 0 adjrange 3 0 0 900 900 0 0 adjrange 4 0 0 900 900 0 0 adjrange 5 0 0 900 900 0 0 adjrange 6 0 0 900 900 0 0 adjrange 7 0 0 900 900 0 0 adjrange 8 0 0 900 900 0 0 adjrange 9 0 0 900 900 0 0 adjrange 10 0 0 900 900 0 0 adjrange 11 0 0 900 900 0 0 # rxrange rxrange 0 1000 2000 rxrange 1 1000 2000 rxrange 2 1000 2000 rxrange 3 1000 2000 # servo servo 0 1000 2000 1500 90 90 100 -1 servo 1 1000 2000 1500 90 90 100 6 servo 2 1000 2000 1500 90 90 100 -1 servo 3 1000 2000 1500 90 90 100 -1 servo 4 1000 2000 1500 90 90 100 -1 servo 5 1000 2000 1500 90 90 100 -1 servo 6 1000 2000 1500 90 90 100 -1 servo 7 1000 2000 1500 90 90 100 -1 set nav_alt_p = 50 set nav_alt_i = 0 set nav_alt_d = 0 set nav_vel_p = 100 set nav_vel_i = 50 set nav_vel_d = 10 set nav_pos_p = 65 set nav_pos_i = 120 set nav_pos_d = 10 set nav_posr_p = 180 set nav_posr_i = 15 set nav_posr_d = 100 set nav_navr_p = 10 set nav_navr_i = 5 set nav_navr_d = 8 set deadband = 5 set yaw_deadband = 5 set throttle_tilt_comp_str = 0 set flaperon_throw_offset = 250 set flaperon_throw_inverted = OFF set gimbal_mode = NORMAL set fw_iterm_throw_limit = 165 set mode_range_logic_operator = OR set default_rate_profile = 0 set mag_declination = 0 set mag_hold_rate_limit = 90 set p_pitch = 40 set i_pitch = 30 set d_pitch = 23 set p_roll = 40 set i_roll = 30 set d_roll = 23 set p_yaw = 85 set i_yaw = 45 set d_yaw = 0 set p_level = 20 set i_level = 15 set d_level = 75 set max_angle_inclination_rll = 300 set max_angle_inclination_pit = 300 set gyro_soft_lpf_hz = 60 set acc_soft_lpf_hz = 15 set dterm_lpf_hz = 40 set yaw_lpf_hz = 30 set yaw_p_limit = 300 set iterm_ignore_threshold = 200 set yaw_iterm_ignore_threshold = 50 set rate_accel_limit_roll_pitch = 0 set rate_accel_limit_yaw = 10000 # dump rates # rateprofile rateprofile 0 set rc_expo = 70 set rc_yaw_expo = 20 set thr_mid = 50 set thr_expo = 0 set roll_rate = 20 set pitch_rate = 20 set yaw_rate = 20 set tpa_rate = 0 set tpa_breakpoint = 1500
Ich garantiere bei meinen Bauberichten und Teilelisten keine Vollständigkeit etc...es wird aus den Teilen gebastelt die gerade herumliegen.
Bitte keine Anfragen zum Bau/Fräsen von Frames, Teilen oder sonstigen Aufträgen. Ich betreibe die Seite rein als Hobby und nutze die zur Verfügung stehende Zeit gerne für meine eigenen Projekte.
Bei einigen Projekten werde ich zu gegebener Zeit die Pläne veröffentlichen - aber auch hier lasse ich mich ungern hetzten ;-)
No waranties for completeness of any contructions, part lists etc.. I build from party i have just lying around in my workshop.
Please, No requests to buy frames, builds, etc.. I run this page in my spare-time and as hobby only. Want to keep my free time to work on my own projects - sorry
I will release the plans for some build at some point in time, but again, please don't ask for unreleased plans, i don't want to get rushed ;-)
Seiten-Werkzeuge
